В РПрУ имеется большое
число элементов и узлов, которые ранее выполнялись, как правило, с помощью
механических и электромеханических блоков и деталей (переключатели диапазонов,
блок настройки, механические шкалы и др.). В настоящее время эти устройства
могут быть реализованы в электронном виде. Вместо блоков переменной емкости
применяют варикапы и варикапные матрицы, вместо механических переключателей –
электронные переключатели с кнопочным или сенсорным управлением. Применение
цифровых шкал индикации частоты позволило более удобно и точнее осуществлять
настройку. Высококачественные приемники могут работать с пультом дистанционного
управления, который позволяет осуществлять основные регулировки и управлять режимами
аппаратуры. За счет применения цифроаналоговых преобразователей, оптронов, а
также усилителей, управляемых напряжением, регулировки осуществляют электронным
способом. Применение новых методов управления особенно заметно в автомобильных
РПрУ, к которым, как известно, предъявляют очень жесткие требования по механической
прочности, вибростойкости и надежности. Возможны работы в широком интервале
температур и условиях высокой влажности. Кроме того, настройка и управление
работы автомобильного приемника должны осуществляться за короткое время и автоматически
во время движения автомобиля. Для этого в РПрУ вводится подстройка (авто поиск)
на сигнал, предусматривается ряд фиксированных настроек. Фиксация настроек
осуществляется за счет применения устройств  выборки-хранения, оперативно запоминающих устройств и
перепрограммируемых постоянных запоминающих устройств.
выборки-хранения, оперативно запоминающих устройств и
перепрограммируемых постоянных запоминающих устройств.
Блоки автоматического
управления на микропроцессорах, работающие по принципу синтеза частот,
позволяют выполнить следующие сервисные функции: прямой набор необходимой рабочей
частоты; хранение ряда значений рабочих частот вещательных станций и информаций
и  информацию о текущем режиме работы
приемника, в том числе при выключенном питании приемника; автоматический поиск
вещательных станций по диапазонам; управление режимом работы приемника;
отображение на жидкокристаллическом дисплее всей информации о работе приемника,
требуемой для эксплуатации и контроля; программирование работы приемника во
времени с помощью встроенного таймера; дистанционное управление.
информацию о текущем режиме работы
приемника, в том числе при выключенном питании приемника; автоматический поиск
вещательных станций по диапазонам; управление режимом работы приемника;
отображение на жидкокристаллическом дисплее всей информации о работе приемника,
требуемой для эксплуатации и контроля; программирование работы приемника во
времени с помощью встроенного таймера; дистанционное управление.
Радиоприемник кроме хороших электрических параметров должен удовлетворять требованиям эстетики и эргономики. Для удобства пользователя расстояние между органами управления выбираются такими, чтобы исключить возможность касания соседних переключателей или кнопок; также оцениваются и усилия, прилагаемые к ручкам и кнопкам – они не должны быть слишком большими.
Таким образом, на основании рассмотренных в данном подразделе тенденций развития РПрУ и предыдущих подразделов, следует, что современные устройства приема выполняются по супергетеродинной схеме; для одновременного приема сигналов различной модуляции; с высоким качеством воспроизведения звуковых программ и связи, которое достигается путем применения интегральных микросхем; электронно-варикапной настройки, а также автоматических систем регулировки усиления, настройки и подстройки частоты; цифровых синтезаторов частот и индикаторных устройств; керамических, кварцевых и монолитных фильтров; сенсоров и электронных коммутирующих устройств.
2.Разработка
технического задания.
РпрУ предназначено для подвижной системы радиосвязи для приема телефонных сигналов. Устройство должно работать в составе подвижных объектов связи и иметь вход для несимметричной антенны.
Действующая высота антенны будет равна:
 , (20).
, (20).
 .
.
где НА=2,5м – рабочая высота антенны.
Емкость антенны СА может определяться следующим образом [3]:
![]() , (21).
, (21).
![]() пФ.
пФ.
Эквивалентная схема антенны РПрУ в диапазоне УКВ состоит из генератора ЭДС Еа с комплексным внутренним сопротивлением Zа:
![]() , (22).
, (22).
где RA – активная составляющая сопротивления ZA;
ХА – реактивная составляющая сопротивления ZA.
Реактивное сопротивление антенны равно:
 , (23).
, (23).
 (Ом)
(Ом)
Активняя составляющая сопротивления
принимается:
![]() .
.
Так как приемник распологается на автомобиле, то для эквивалента антенны необходимо учитывать паразитную емкость корпуса и кабины Спар:
![]() . (24).
. (24).
Волновое сопротивление антенны:
 (25).
(25).
 (Ом),
(Ом),
где rа – средний диаметр трубок антенны равный 0,5 см.
Емкость антенны:
1) на максимальной частоте:
 (26).
(26).
 (пФ).
(пФ).
2) на минимальной частоте:
 (27).
(27).
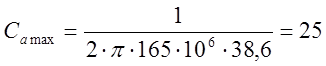 (пФ)
(пФ)
Среднее значение емкости антенны:
 (28).
(28).
![]()
 (пФ)
(пФ)
Индуктивность антенны приблизительно равна нулю.
Поэтому схема эквивалента антенны будет иметь вид, рис.20.
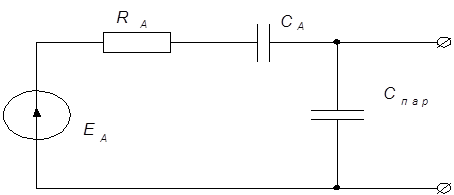
Рис.20.- Эквивалентная схема антенны.
Отношение С/Ш на выходе приемника: qвых=3
(для телефонных сигналов принимается 3…10).
 Относительная
нестабильность: d=10-6.
Относительная
нестабильность: d=10-6.
Перестройка приемника – электронная, индикация чатстоты, осуществляется с помощью цифровой шкалы.
Индекс модуляции:
Полоса частот, занимаемая ЧМ – сигналом[3]:
![]()
Шумовая полоса линейного тракта [3]:
![]() , (29).
, (29).
![]()
Минимальное отношение С/Ш на входе приемника [3]:
 , (30).
, (30).
 .
.
Напряженность внешних помех отнесенная к 1кГц Еп с учетом рис.4, выбирается не менее 1,2мкВ/м.
Допустимый уровень напряжения возникающий от просачивания гетеродина на вход РпрУ не более 50мкВ.
Глубина регулирования ручного регулятора не более 60дБ.
Напряжение питания от бортовой сети 14,2В, колеблется в пределах от 10,8 до 15,6В.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.