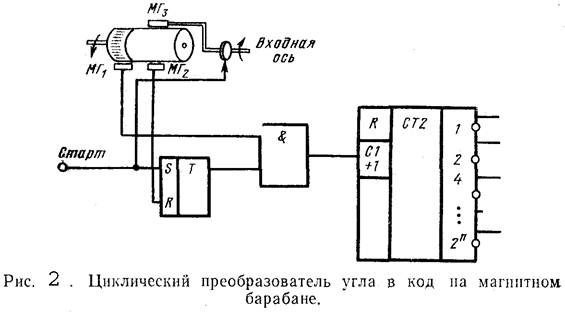
В качестве примера такого АЦП рассмотрим преобразователь угла в код на магнитном барабане (рис. 2). Постоянно вращающийся магнитный барабан имеет две дорожки. На первой через равные угловые промежутки нанесены метки, представляющие собой постоянно намагниченные участки минимального размера, на этой дорожке расположена магнитная головка МГ1, выходные импульсы с которой поступают на счетчик. На второй дорожке нет постоянно записанных меток; над этой дорожкой расположена магнитная головка МГ3, закрепленная на входной оси, угол поворота которой должен быть преобразован в код. Кроме головки МГ3 над второй дорожкой расположена неподвижная магнитная головка МГ2, осуществляющая считывание выходного сигнала, возникающего при прохождении метки, записанной головкой МГ3, расположенной под головкой МГ2.
При подаче на головку МГ3 старт-импульса на второй дорожке возникает метка, угловое положение которой соответствует текущему значению угла поворота входной оси. Одновременно приход старт-импульса открывает схему совпадения и импульсы с головки МГ\ начинают поступать на счетчик. Когда записанная на второй дорожке метка дойдет до неподвижной головки МГ2, выходной импульс этой головки перебросит триггер в нулевое положение и импульсы с головки МГ1 перестанут поступать на счетчик. Таким образом, число импульсов, зафиксированных счетчиком, будет пропорционально углу поворота МГ3, т. е. углу поворота входной оси. В конце каждого цикла метка на второй дорожке стирается и считываются показания счетчика. Точность преобразования зависит от плотности записи меток на первой дорожке и длины этой дорожки (диаметра барабана). Характерно, что для обеспечения точности преобразования нет необходимости в постоянстве частоты вращения барабана, что создает определенные удобства.
Для повышения точности возможны два метода. Первый метод аналогичен методу повышения точности преобразователей временного интервала в код, в котором используются линии задержки. При этом на поверхность барабана наносится несколько семейств меток, сдвинутых одна относительно другой на часть кванта и считываемых индивидуальными магнитными головками, связанными с индивидуальными счетчиками. При втором методе, временной интервал между моментами поступления сигналов от двух соседних меток разбивается на более мелкие временные интервалы с помощью импульсов генератора высокой частоты. В этом случае пространственная развертка дополняется временной, которая требует постоянства частоты вращения барабана на время между поступлениями сигналов от соседних меток.
Второй группой циклических преобразователей угла в код являются преобразователи с временной разверткой. В простейшем варианте такого преобразования угол между началом отсчета и текущим положением оси преобразуется во временной интервал с помощью чувствительного элемента, вращающегося с постоянной скоростью. Временной интервал преобразуется в цифровой код рассмотренными в гл. 4 методами. Точность такого преобразователя в основном определяется постоянством-частоты вращения чувствительного элемента, а так как частота вращения зависит от ряда внешних факторов, таких как величина питающего напряжения, температура окружающей среды и других, то этот тип преобразователя в простейшем исполнении не обеспечивает высокой точности и сравнительно редко используется.
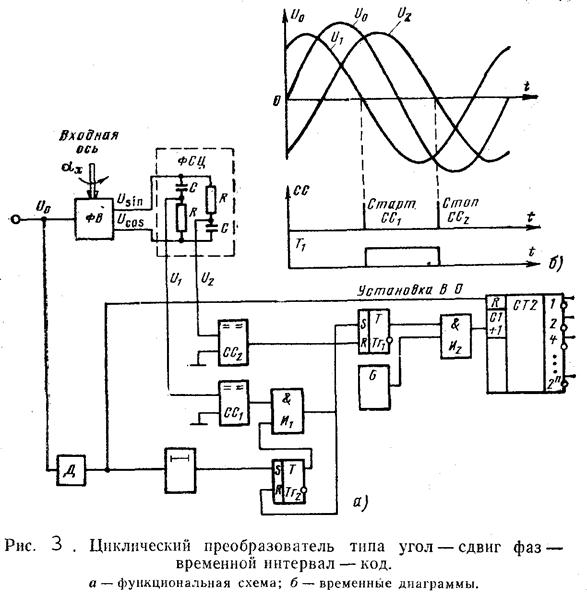
Широкое распространение нашли циклические преобразователи с временной разверткой, у которых исходная угловая величина вначале преобразуется в угол сдвига фазы, который затем преобразуется в код. В этом случае последовательно выполняются преобразования угол–фаза–временной интервал–код. Для осуществления преобразования угла поворота оси в сдвиг фаз используются фазовращатели, наиболее распространенными из которых являются индукционные электрические, машины типа вращающихся трансформаторов или сельсинов. У этих машин амплитуда выходного напряжения переменного тока, снимаемого с одной пли двух обмоток, пропорциональна синусу или косинусу угла поворота ротора машины. Непосредственное использование этого выходного напряжения вызывает необходимость перехода от синусной зависимости к зависимости от угла. Поэтому на практике в качестве фазовращателя используют вращающийся трансформатор и снимают два выходных напряжения с синусной и косинусной обмоток и пропускают эти напряжения через специальную фазосдвигающую цепочку. В этом случае на выходе фазосдвигающей цепочки удается получить переменное напряжение, имеющее фазовый сдвиг относительно питающего напряжения, пропорциональный углу поворота ротора ах вращающегося трансформатора [14].
Функциональная схема такого преобразователя приведена на рис. 3, а. На выходе вращающегося трансформатора получаются два напряжения:
![]() , [1]
, [1]
![]() , [2]
, [2]
где ![]() –
амплитуда питающего напряжения;
–
амплитуда питающего напряжения; ![]() – коэффициент
трансформации во вращающемся трансформаторе;
– коэффициент
трансформации во вращающемся трансформаторе; ![]() – частота питающего
напряжения.
– частота питающего
напряжения.
Если параметры элементов фазосдвигающей цепочки подобраны так,
чтобы ![]() , то общий фазовый сдвиг между напряжениями
, то общий фазовый сдвиг между напряжениями ![]() и
и
![]() [14]:
[14]:
 .
.
Этот фазовый сдвиг с помощью схем сравнения (компараторов) ![]() и
и
![]() преобразуется
во временной интервал. Для этого компараторы определяют моменты времени, в
которые эти напряжения проходят через нуль в определенном направлении,
например, как это показано на рис. 3, б, из положительной области в
отрицательную. Временной интервал будет пропорционален сдвигу фаз, а значит, и
углу поворота входной оси
преобразуется
во временной интервал. Для этого компараторы определяют моменты времени, в
которые эти напряжения проходят через нуль в определенном направлении,
например, как это показано на рис. 3, б, из положительной области в
отрицательную. Временной интервал будет пропорционален сдвигу фаз, а значит, и
углу поворота входной оси ![]() , Преобразование
полученного временного интервала в код может быть осуществлено методами,
которые описаны в гл. 4.
, Преобразование
полученного временного интервала в код может быть осуществлено методами,
которые описаны в гл. 4.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.