Весовая обработка позволяет точно определить центр пачки, однако аппаратурно реализуется достаточно сложно. С целью упрощения аппаратуры можно считать пачку прямоугольной. В этом случае единственный признак - по которому можно отличить область пачки от области помех - увеличение плотности единиц в области цели. Основной проблемой при этом является фиксация границ пачки. Для этого существует ряд критериев, в соответствии с которыми определяют принадлежность отдельных импульсов к одной и той же пачке. Наиболее широко распространен критерий обнаружения, который состоит в принятии решения о появлении пачки в случае, если появляется m единиц на n смежных позициях. Конец пачки наиболее часто фиксируется по наличие серии из К нулей. Если К мало, то велика вероятность "расщепления" цели или даже не потери, т.к. на внутренних позициях пачки допустимы пропуски одного или нескольких импульсов (единиц). Для корректного выбора К необходима априорная информация о характере распределения нулей и единиц в реальном сигнале.
Устройства для безвесовой обработки представляют собой логические структуры, которые изучаются в теории цифровых автоматов. Рассмотрим для примера логический синтез цифрового автомата, обнаруживающего пачку при появлении 2-х единиц на 3-х смежных позициях, а конец пачки - по серии из 2-х нулей.
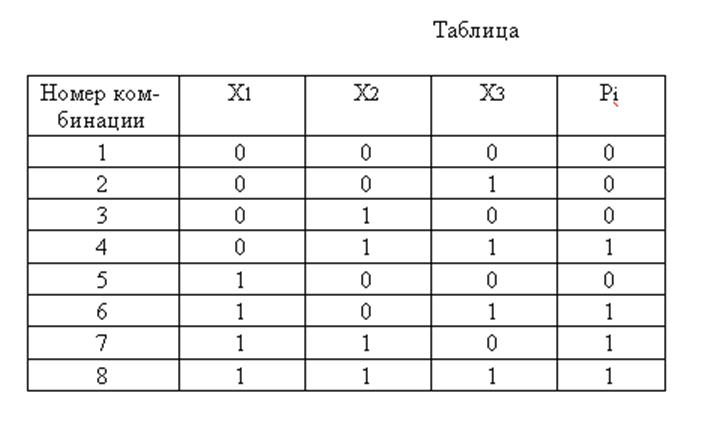
В таблице приведены все комбинации xi, которые могут возникнуть в 3-х смежных позициях. Видно, что событие Pi=1, удовлетворяющее принятому критерию, выполняется для 4,6,7 и 8 комбинаций. Таким образом, логическая формула, определяющая условие обнаружения следующая:
![]() .
.
После минимизации этого выражения известными методами получим
![]() .
.
Условие фиксации конца
![]() .
.
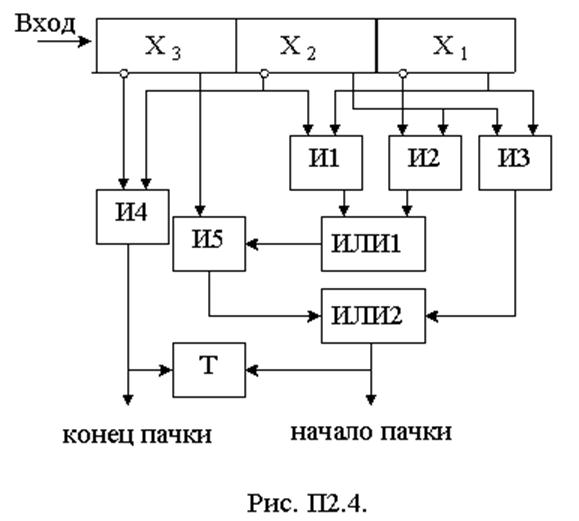
На рис. П2.4 приведена структурная схема автомата реализующего программу 2/3-2, т.е. обнаружение пачки по двум импульсам на трех смежных позициях при определении конца пачки по серии из 2-х нулей после начала пачки. Триггер Т2 включается импульсом "Начало пачки" и разрешает выявление конца пачки. Возвращается триггер Т2 в исходное состояние импульсом "Конец пачки".
Вторичная обработка радиолокационной информации состоит в автоматизированном определении характеристик траекторий целей (курс цели, скорость и т.д.). Чтобы принять решение о наличии цели и определить параметры ее траектории, необходимо проанализировать информацию, полученную за несколько обзоров. Такой анализ производится ЭВМ по соответствующим алгоритмам. Процесс обнаружения цели (автозахват) может происходить следующим образом. Допустим, принят отраженный от цели сигнал, сформирована отметка X2 и измерены ее координаты. Порядок максимальной Vmax и минимальной Vmin скоростей воздушных объектов должен быть известен. Тогда можно сформировать кольцо, в которое может попасть цель при следующем обзоре (рис. П2.5).
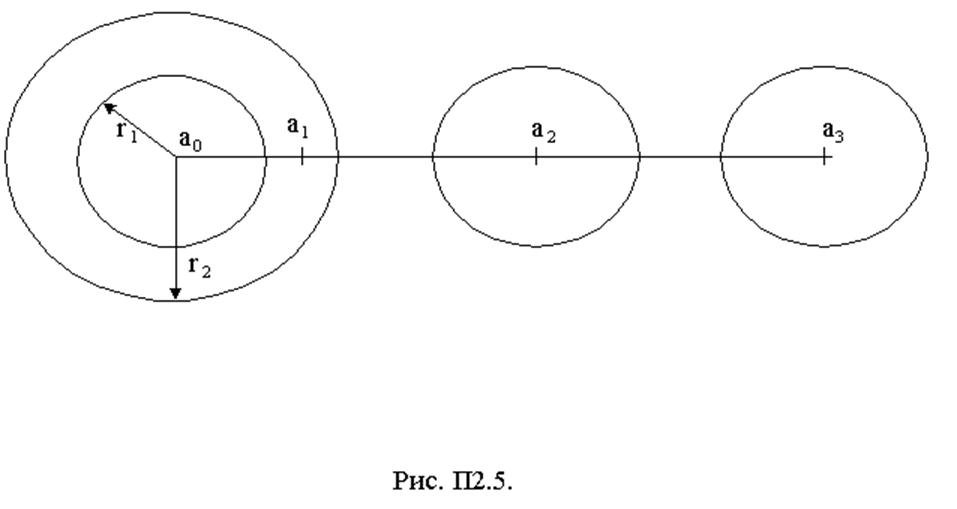
Здесь а0 - исходная отметка (центр кольца),
r1 = Vmin *Tоб, r2 = Vmax *Tоб
(Tоб - время между двумя обзорами).
Такая операция называется стробированием. Если во втором обзоре отметка попала в строб, то по новым координатам легко рассчитать курс цели и ее скорость и сформировать очередной строб (более узкий, чем первый) вокруг ожидаемой точки нахождения цели в третьем обзоре и т.д. Такой процесс называется экстраполяцией. Если в точках а1 находилась групповая цель, а в точке аi+1 произошло ее разделение, то точка аr+1 считается началом очередной траектории. Экстраполированные значения координат (например, дальность) рассчитываются по формуле
 .
.
Попадание цели в новый строб определяют из системы неравенств
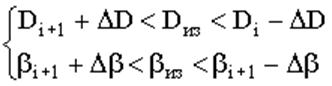 ,
,
где Dиз, bиз -
соответственно, измеренные значения дальности азимута; ![]() -
полуширина строба по дальности и (азимуту в прямоугольных координатах. В
случае, если цель потеряна (размер строба оказался мал), - отметка от цели
будет воспринята как начало новой траектории. Автоматическое слежение за целью
называют автосопровождением. Если цель "увязана", т.е. идет уверенное
сопровождение цели, то задача состоит в том, чтобы из нескольких новых отметок,
полученных в очередном обзоре, выбрать ту, которая принадлежит сопровождаемой
цели. В некоторых работах вводится понятие третичной обработки. Речь идет о
радиолокационных системах, содержащих несколько территориально разнесенных РЛС.
Рабочие зоны таких РЛС перекрываются, поэтому одна и та же цель наблюдается
различными РЛС под различными ракурсами. Обработка информации, поступающей со
всех РЛС, позволяет значительно улучшить характеристики системы и, в первую
очередь, помехоустойчивость.
-
полуширина строба по дальности и (азимуту в прямоугольных координатах. В
случае, если цель потеряна (размер строба оказался мал), - отметка от цели
будет воспринята как начало новой траектории. Автоматическое слежение за целью
называют автосопровождением. Если цель "увязана", т.е. идет уверенное
сопровождение цели, то задача состоит в том, чтобы из нескольких новых отметок,
полученных в очередном обзоре, выбрать ту, которая принадлежит сопровождаемой
цели. В некоторых работах вводится понятие третичной обработки. Речь идет о
радиолокационных системах, содержащих несколько территориально разнесенных РЛС.
Рабочие зоны таких РЛС перекрываются, поэтому одна и та же цель наблюдается
различными РЛС под различными ракурсами. Обработка информации, поступающей со
всех РЛС, позволяет значительно улучшить характеристики системы и, в первую
очередь, помехоустойчивость.
Одним из весьма перспективных направлений цифровой обработки радиолокационной информации является применение быстрого преобразования Фурье [11,17].
Приложение 3
Примеры использования ЭВМ при расчетах
Задание:
Рассчитать зависимость энергии зондирующих импульсов от длины волны. Определить длину волны, на которой значение энергии зондирующих импульсов будет минимально.
Исходные данные к расчету:
1. Диапазон длин волн ![]() - (0,3-8) см.
- (0,3-8) см.
2. Эффективная площадь антенны А - 5м2.
3. Дальность действия Rmax - 150 км.
4. Эффективная площадь рассеяния цели ![]() - 2м2 .
- 2м2 .
5. Коэффициент шума Кш - 3.
6. Коэффициент различимости Кр - 10.
7. Зависимость коэффициента потерь от длины волны описывается функцией .
Для расчета воспользуемся выражением 2.2.1 и 2.2.3
 ,
,
которое с учетом  перепишем
в виде:
перепишем
в виде:
 .
.
Значение энергии:
 ,
,
где F = 0,46 Rmax n 10-3;  .
.
Подставим конкретные значения
 ,
,
 , F = 69
, F = 69
Таким образом, расчету должна подвергаться величина, как функция длины волны
 .
.
Во многих практических случаях информация о
поведении в диапазоне значений ![]() может быть полезной. Далее необходимо
разработать алгоритм и программу на расчета на одном из языков программирования
м выполнить расчет. Допускается привлечение пакета класса MathCad. Результат
представить графиком и/или таблицей.
может быть полезной. Далее необходимо
разработать алгоритм и программу на расчета на одном из языков программирования
м выполнить расчет. Допускается привлечение пакета класса MathCad. Результат
представить графиком и/или таблицей.
Материалы курсового проекта (работы) представляются ведущему преподавателю не позднее 2 недель до окончания семестра. Допускается и приветствуется представление материалов по электронной почте по адресу s.panko@sib.transtk.ru/ Вся переписка в этом случае будет и обсуждение принятых решений, вплоть до защиты будет выполняться средствами электронной почты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.