то у импульсной характеристики расположение сгущений и разрежения должно быть противоположным (правый график на том же рис.). Реализуется фильтр на основе линии задержки с неравностоящими отводами, полосового фильтра и интегратора. Отводы должны быть расположены в соответствии с требуемой импульсной характеристикой. На рис. П1.4 приведены эпюры напряжений оптимального фильтра для сигнала без внутриимпульсной модуляции (слева) и сигналов с ЛЧМ (справа). Для простого радиоимпульса без внутриимпульсной модуляции отводы должны линии задержки быть расположены равномерно.
С каждого отвода снимается
частотно-модулированный импульc. Смгналы с отводов линии задержки суммируются.
Расположение отводов подобрано так, чтобы в момент окончания импульсов на входе
линии задержки происходило суммирование всех положительных полупериодов.
Амплитуда результирующего колебания ("остатков") в другие моменты
времени близка к нулю. Длительность выходного импульса в ![]() существенно меньше длительности
входного.
существенно меньше длительности
входного.
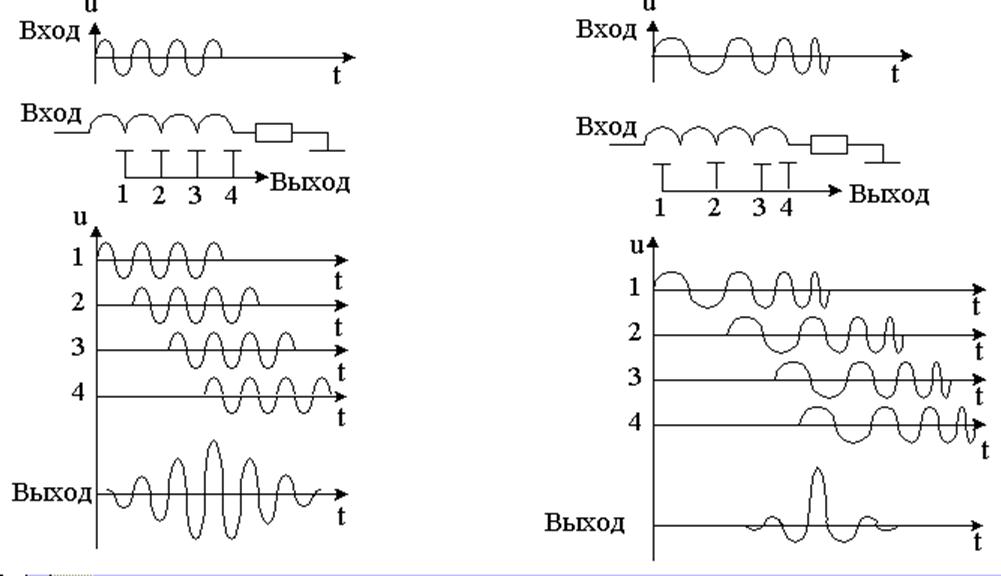
Рис. П1.4
Фазоманипулированный сигнал
Кроме плавного изменения частоты сигнала, как это бывает в случае ЛЧМ, также возможно изменение фазы сигнала. Технически проще реализуется дискретное изменение фазы. Такой сигнал называется фазоманипулированным.
Наибольшее распространение получила фазовая манипуляция по равномерным кодам (Хэмминга, Баркера и др.). Таким образом, радиоимпульс с фазовой манипуляцией представляет, собой дискретный сигнал, обычно с прямоугольной огибающей, фаза которого в дискретные моменты времени скачком меняет свое значение по определенному коду. Пример такого сигнала приведен на рис. П1.5а, а закон манипуляции – на рис. П1.5б.
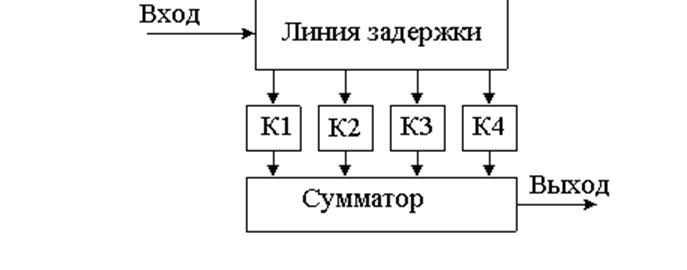
Рис. П1.5
В верхней части рис. П1.5 приведена структурная схема фильтра, согласованного с указанным сигналом. Фильтр построен на основе линии задержки с отводами. В цепи отводов помещены усилители с единичным коэффициентом усиления, но с инверсией или без нее. Знаки коэффициентов усиления - импульсная характеристика фильтра - устанавливаются зеркальными относительно сигнала. Таким образом, К1 =1, К2= -1, К3=1, К4=1. Здесь единица означает усиление без инверсии, минус единица – усиление с инверсией.
Для четырехэлементного кода импульс укорачивается в 4 раза. Использование такого фильтра позволяет работать при мощности шума, превышающей мощность сигнала на входе 2-3 раза. На выходе такого звена обычно ставят фильтр, согласованный с одиночным элементарным радиоимпульсом. Вопросы построения и характеристики аналоговых систем сжатия подробно рассмотрены в [2;4].
Большие перспективы в технике сжатия открывают цифровые методы обработки [17, с. 827].
Приложение 2
Цифровая обработка радиолокационной информации и ее отображение [7-10-14]
Цифровая обработка радиолокационной информации является мощный средством автоматизации управления воздушным движением. Ежегодно мировой объем пассажирских и грузовых воздушных перевозок увеличивается на 10-15% и удваивается через каждые пять лет. Поэтому автоматизированные системы управления воздушным движением активно внедряются в практику работы авиационных предприятий. Использование цифровых принципов обработки радиолокационной информации позволяет эффективно использовать современную элементную базу -интегральные микросхемы высокой степени интеграции, микропроцессоры.
Ив приемного тракта РЛС информация о координатах поступает на устройство первичной обработки, где кодируется, обрабатывается и передается на вход ЭВМ вторичной обработки. Вычислительная машина вторичной обработки производит вычисление параметров траекторий, их “завязку”, а также сглаживание и экстраполяцию координат.
Устройство первичной обработки является устройством сопряжения РЛС с ЭВМ, т.е. преобразователем информации о цели в стандартные сообщения применительно к конкретной ЭВМ. Кроме того, устройство первичной обработки должно отсеивать помехи и выделять полезные сигналы, а также измерять координаты целей.
Как известно, оптимальной процедурой обработки при обнаружении импульсных радиосигналов, является их накопление в течение времени нахождения цели в луче диаграммы направленности антенны. Аналоговые накопители - потенциалоскопы и ультразвуковые линии задержки - технически и эксплуатационно сложны. Цифровые накопители значительно проще, программа их работы без труда может меняться. Идеи цифрового накопления применительно к РЛС известны с конца пятидесятых - начала шестидесятых годов, однако их практическая реализация оказалась возможной только в настоящее время на основе современной микроэлектронной базы,
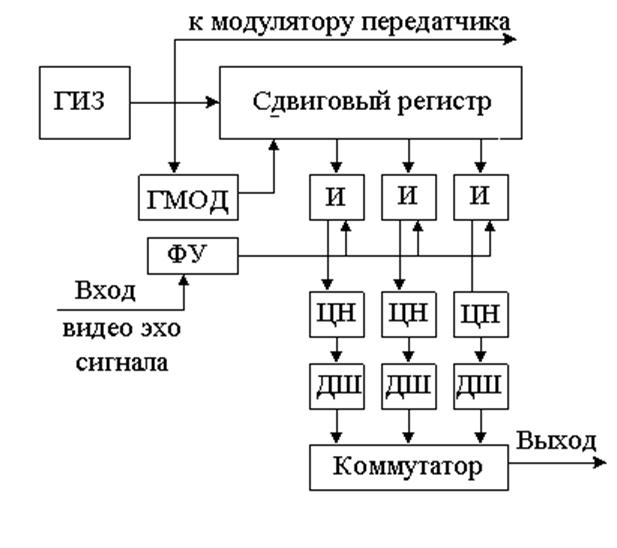
Рис. П2.1
На рис. П2.1. приведена структурная схема устройства автоматизированного
обнаружения сигналов во всей зоне РЛС.
Здесь ГИЗ - генератор импульсов запуска,
ГМОД - генератор масштабных отметок дальности,
ФУ - формирующее устройство,
И - схемы совпадения,
ЦН - цифровой накопитель (регистр или двоичный счетчик),
ДШ - дешифратор.
В сдвиговой регистр СР в момент посылки зондирующего импульса записывается единица. Генератор масштабных отметок дальности - обычный делитель частоты - вырабатывает импульсы, период следования которых в единицах дальности соизмерим с разрешающей способностью и выбирается из соображений удобства отсчета. Импульсы этого генератора используются для перемещения (сдвига) единицы вдоль регистра. Максимальное количество разрядов СР
 ,
,
где D - дальность действия РЛС;
c - скорость света;
tГМОД - период импульсов ГМОД.
Видеосигнал поступает с выхода приемника РЛС. Если напряжение видеосигнала превышает порог ограничения в ПУ, то на выходе формирующего устройства ФУ формируется стандартный по длительности и амплитуде импульс, который записывается соответствующий цифровой накопитель через открытую схему И. Если в текущем периоде tГМОД видеосигнал отсутствовал, то число, записанное в ЦН, не изменится. Таким образом, движение единицы в СР синхронизируется с разверткой по дальности, а в цифровых накопителях накапливаются импульсы от целей, расположенных на различных удалениях на одном азимуте. В конце каждого периода зондирующих импульсов (импульсов запуска) коммутатор опрашивает состояние дешифраторов. Если на некотором участке дальности критерий обнаружения (в данном случае - количество импульсов) выполнился, то на выходе дешифратора появится единица. Это обозначает принятие решения о наличии цели на этом участке дальности. Оценка координаты дальности осуществляется по номеру ЦН, а оценка координаты азимута производится путем фиксации центра принятой пачки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.