В ходе предшествующих рассуждений было установлено, что в соответствии с принципами построения радиолокационного поля, зона обнаружения РЛС РТВ представляет собой вырезку из цилиндра вращения.
Зоной обнаружения (ЗО) является область пространства, в пределах которой
радиолокационные цели с заданной ЭПР обнаруживаются РЛС (РЛК) в каждом обзоре с
вероятностью ![]() не менее заданной. Обычно принимают,
что на границе ЗО
не менее заданной. Обычно принимают,
что на границе ЗО ![]() .
.
Форму ЗО принято характеризовать графиком или таблицей
зависимости ![]() , где
, где ![]() - дальность до границы зоны обнаружения,
- дальность до границы зоны обнаружения, ![]() –
высота полета цели над поверхностью земли, а также размерами зоны в
азимутальной плоскости.
–
высота полета цели над поверхностью земли, а также размерами зоны в
азимутальной плоскости.
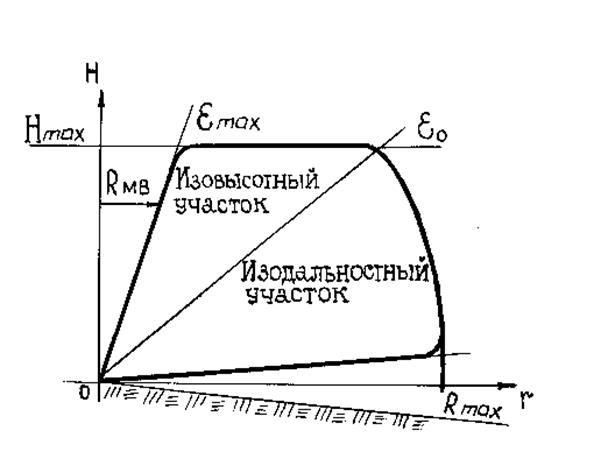
Рис.1 Сечение зоны обнаружения РЛС в угломестной плоскости
Форму зоны в угломестной плоскости (см. рис.1) в РЛС
обнаружения и наведения обычно выбирают такой, чтобы для углов места ![]() обеспечивалась максимально возможная
дальность обнаружения (изодальностный участок зоны), а углов места, превышающих
угол
обеспечивалась максимально возможная
дальность обнаружения (изодальностный участок зоны), а углов места, превышающих
угол ![]() - максимальная высота обнаружения
(изовысотный участок зоны). Аналитически сечение такой зоны в вертикальной
плоскости в полярной системе координат описывается выражением:
- максимальная высота обнаружения
(изовысотный участок зоны). Аналитически сечение такой зоны в вертикальной
плоскости в полярной системе координат описывается выражением:
 (1)
(1)
и носит название косекансной.
Параметрами ЗО являются:
· размеры зоны в азимутальной плоскости;
·
минимальный ![]() и максимальный
и максимальный ![]() углы места зоны;
углы места зоны;
·
максимальная высота ![]() ;
;
·
максимальная дальность ![]() ;
;
·
радиус мертвой воронки ![]() .
.
Дальность обнаружения изовысотной зоны, как функция высоты, определяется следующими рассуждениями:
1.
Из треугольника ОАВ ![]()
2.
Из треугольника ОВС находим ![]() для фиксированного
для фиксированного
3.
Радиус мертвой воронки ![]() .
.
Параметры зоны выбираются с учетом тактических
требований и технических возможностей их реализации. Так, значение минимального
угла места ![]() в РЛС сантиметрового диапазона
ограничивается условиями распространения сантиметровых волн в приземном слое. С
одной стороны, необходимо выбрать
в РЛС сантиметрового диапазона
ограничивается условиями распространения сантиметровых волн в приземном слое. С
одной стороны, необходимо выбрать ![]() как можно
наиболее близким к нулю, с другой - необходимо оторвать диаграмму направленности
от земли, так как облучение земной поверхности в сантиметровом диапазоне волн
приводит к сильной изрезанности зоны на малых углах места вследствие
интерференции прямого и отраженного от неровной поверхности лучей. Из-за
движения под действием ветра покрывающих поверхность кустов, травы и др.
непрерывно изменяется амплитуда и фаза отраженного луча, и, следовательно,
непрерывно изменяется форма зоны. Практически в сантиметровом диапазоне
выбирают
как можно
наиболее близким к нулю, с другой - необходимо оторвать диаграмму направленности
от земли, так как облучение земной поверхности в сантиметровом диапазоне волн
приводит к сильной изрезанности зоны на малых углах места вследствие
интерференции прямого и отраженного от неровной поверхности лучей. Из-за
движения под действием ветра покрывающих поверхность кустов, травы и др.
непрерывно изменяется амплитуда и фаза отраженного луча, и, следовательно,
непрерывно изменяется форма зоны. Практически в сантиметровом диапазоне
выбирают ![]() .
.
Для снижения ![]() до
нуля и даже до отрицательных значений, где это позволяет позиция и высота
подъема антенны, предусматривают изменение наклона антенны в вертикальной плоскости.
до
нуля и даже до отрицательных значений, где это позволяет позиция и высота
подъема антенны, предусматривают изменение наклона антенны в вертикальной плоскости.
В мертвом и верхней части дециметрового диапазона волн
зона обзора формируется с участием земли, и значение ![]() для
ровного участка практически однозначно определяется отношением длины волны к
высоте подъема фазового центра антенны
для
ровного участка практически однозначно определяется отношением длины волны к
высоте подъема фазового центра антенны ![]()
![]() .
.
Максимальный угол места зоны ![]() для
исключения мертвой воронки желательно было бы выбирать равным 900
или близким к нему. Однако это привело бы к значительному усложнению
конструкции антенной системы. В настоящее время считается целесообразным выбор
значений
для
исключения мертвой воронки желательно было бы выбирать равным 900
или близким к нему. Однако это привело бы к значительному усложнению
конструкции антенной системы. В настоящее время считается целесообразным выбор
значений ![]() в сантиметровом диапазоне и
в сантиметровом диапазоне и ![]() - в мертвом. При этом радиус мертвой
воронки, равный
- в мертвом. При этом радиус мертвой
воронки, равный ![]() (здесь
(здесь ![]() - высота полета цели),
соответственно составляет (1...1,5)
- высота полета цели),
соответственно составляет (1...1,5) ![]() и (2...4,5)
и (2...4,5) ![]() . Верхняя граница зоны
. Верхняя граница зоны ![]() должна быть не меньше потолка полета
состоящих на вооружении и перспективных СВН противника. Для современных РЛС
должна быть не меньше потолка полета
состоящих на вооружении и перспективных СВН противника. Для современных РЛС ![]() .
.
Максимальную дальность обнаружения ![]() целей, летящих на максимальной
высоте
целей, летящих на максимальной
высоте ![]() , желательно получить равной
дальности прямой видимости
, желательно получить равной
дальности прямой видимости
![]() ,
,
где
![]() в километрах,
в километрах, ![]() и
и ![]() -
в метрах.
-
в метрах.
Однако получение таких дальностей связано со
значительным увеличением мощности передающего устройства и, как следствие, с
увеличением стоимости и объема аппаратуры РЛС. Поэтому в настоящее время
обеспечивают дальность обнаружения, близкую к дальности прямой видимости,
только лишь маловысотных целей и целей с большими средними значениями
эффективной поверхности ![]() (например,
стратегических бомбардировщиков). По цели с
(например,
стратегических бомбардировщиков). По цели с ![]() (истребитель)
в РЛС обнаружения и наведения считается приемлемым получение дальности
(истребитель)
в РЛС обнаружения и наведения считается приемлемым получение дальности ![]() .
.
Наряду с задачей обнаружения радиолокационными
станциями решается задача измерения пространственных координат, обнаруженных
радиолокационных целей. Разрешается способность и точность определения угловых
координат обнаруживаемых целей определяется пространственной избирательностью и
направленностью антенной системы в соответствующих угловых координатах. Направленная
антенна обслуживает одновременно одним лучом небольшой телесный угол ![]() , который значительно
меньше телесного угла
, который значительно
меньше телесного угла ![]() , зоны обнаружения РЛС. Для
формирования требуемой зоны обнаружения РЛС в РТВ применяются обзор периодически
повторяющаяся процедура последовательного облучения элементов
, зоны обнаружения РЛС. Для
формирования требуемой зоны обнаружения РЛС в РТВ применяются обзор периодически
повторяющаяся процедура последовательного облучения элементов ![]() и приема эхо-сигналов из облучаемых
элементов. В РТВ наибольшее распространение получили две программы обзора
пространства:
и приема эхо-сигналов из облучаемых
элементов. В РТВ наибольшее распространение получили две программы обзора
пространства:
· параллельный по углу места и последовательный по азимуту;
· последовательный по углу места и последовательный по азимуту.
Косеконсная форма зоны обнаружения в вертикальной плоскости может быть получена двумя различными путями: при одноканальном либо многоканальном построении приемно-передающего и антенно-волноводного трактов дальномера.
При одноканальном построении зона создается с помощью одного широкого луча антенны, перекрывающего заданные углы места (что исключает возможность измерения угла места), либо одного узкого луча, сканирующего по углу места, при необходимости измерения третьей координаты.
При многоканальном построении РЛС требуемая зона
формируется с помощью нескольких смещенных друг относительно друга по углу
места сравнительно узких лучей, причем лучи верхних углов места ![]() обеспечивают косеконсную форму зоны
обнаружения. С каждым лучом антенны связан свой передатчик и приемник.
обеспечивают косеконсную форму зоны
обнаружения. С каждым лучом антенны связан свой передатчик и приемник.
Многоканальное построение зоны обнаружения является белее сложным, но имеет рад достоинств по сравнению с одноканальным.
Во-первых, повышается помехозащищенность РЛС, так как рабочие частоты каналов могут выбраны различными с достаточно большим разносом друг от друга.
Во-вторых, если каждый луч формируется с помощью отдельной антенны , то представляется возможность управления формой зоны в соответствии с воздушной и помеховой обстановкой, а так же в зависимости от исправности некоторых каналов.
В-третьих, повышается надежность РЛС, так как отказ одного из каналов не означает полного отказа всего дальномера.
В-четвертых, при многоканальном построении используются большие площади антенн в каждом угломестном направлении, чем достигается существенный выигрыш в потребляемой энергии передающего устройства.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.