Лекция 4. 30.10.02.
АДАПТИВНАЯ ОБРАБОТКА СИГНАЛОВ
(ASP – adaptive signal processing)
Литература
1. Б. Уидроу, С. Стирнз. Адаптивная обработка сигналов. М.: Радио и связь, 1989.
2. Адаптивные фильтры. Под ред. К. Ф. Коуэна, П.М. Гранта. М.: Мир, 1988.
3. Гольденберг Л.М. и др. Цифровая обработка сигналов. Справочник. М.: Радио и связь, 1985.
1. Определение и применение АОС
АОС – это обработка, при которой параметры системы подстраиваются (адаптируются) к оптимальным значениям на основе текущей информации.
АОС реализуется с помощью адаптивных ЦФ (АЦФ).
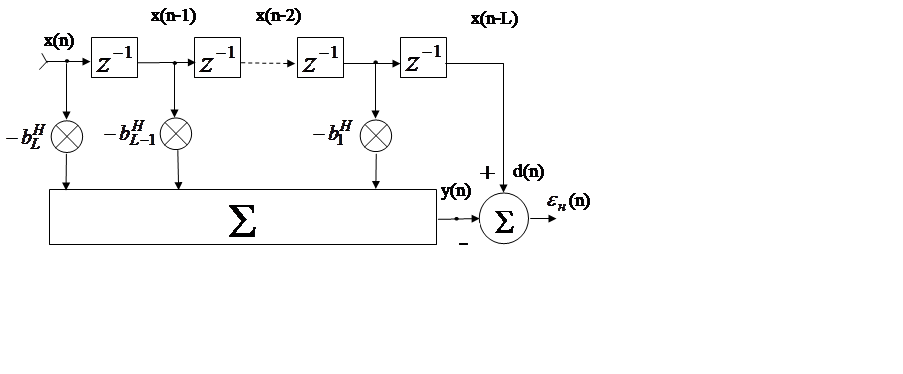
Общая структура АОС с обратной связью имеет вид:
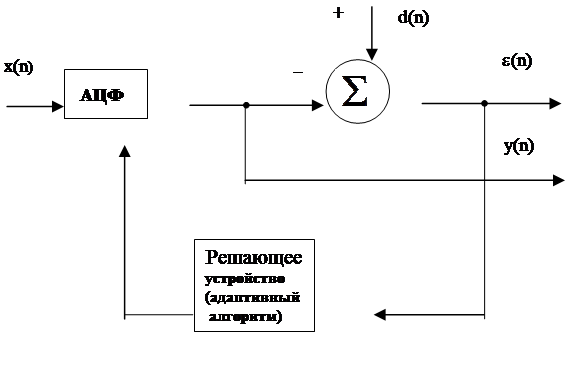 |
Здесь обозначены:
x(n) – входной обрабатываемый сигнал, по которому производится настройка системы;
d(n)- требуемый выходной сигнал (отклик) системы или обучающий сигнал;
y(n)-действительный выходной сигнал или предсказанное значение d(n);
![]() (n)=d(n)-y(n) –
ошибка адаптации или сигнал ошибки.
(n)=d(n)-y(n) –
ошибка адаптации или сигнал ошибки.
Адаптация системы осуществляется в соответствии с критерием минимума среднего квадрата ошибки (СКО):
 ,
,
где М[e2(n)] –математическое ожидание квадрата ошибки.
Из этого условия находится оптимальный порядок АЦФ и его оптимальные коэффициенты. При этом оптимальный выход системы равен:
![]() .
.
В качестве АЦФ применяется РФ и НФ, но чаще всего НФ ввиду их потенциальной устойчивости и унимодальности кривой ошибок, т.е. наличия одного минимума СКО в зависимости от вектора весовых коэффициентов фильтра.
Применения АОС:
оптимальная фильтрация, компенсация помех, идентификация объектов, выравнивание или коррекция каналов (обратное моделирование) и др.
Пример структурной схемы системы адаптивной идентификации (моделирования) объектов и процессов:
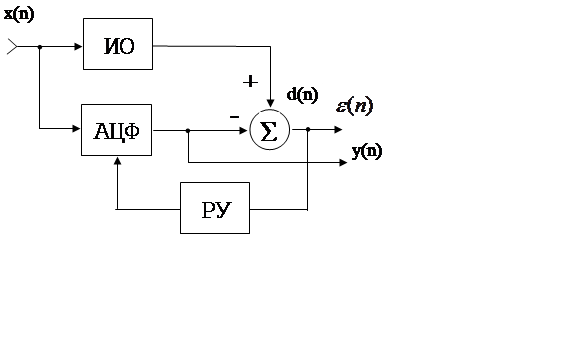 |
После
завершения процесса адаптации ![]() и передаточная
функция АЦФ соответствует передаточной функции исследуемого объекта (ИО):
и передаточная
функция АЦФ соответствует передаточной функции исследуемого объекта (ИО): ![]() .
.
Основными алгоритмами адаптации систем АОС или алгоритмами настройки адаптивных фильтров являются:
1. Точный алгоритм адаптации Винера (алгоритм точной настройки адаптивного НФ).
2. Итерационные градиентные алгоритмы.
2. Точный алгоритм настройки
адаптивного нерекурсивного фильтра
АНФ, как и неадаптивный, реализует алгоритм ДВС:
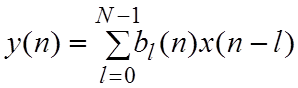 ,
где
,
где ![]() - весовые коэффициенты НФ, зависящие
от времени, т. е. от n.
- весовые коэффициенты НФ, зависящие
от времени, т. е. от n.
Запишем ДВС в матричной форме:
![]() ,
,
где 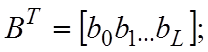
 - матрица-строка весовых
коэффициентов и отсчётов сигнала;
- матрица-строка весовых
коэффициентов и отсчётов сигнала; ![]() .
.
Найдём
сигнал ошибки ![]() и его квадрат
и его квадрат ![]() :
:
![]()

Перейдём
к СКО, т.е. к М.О.  :
:
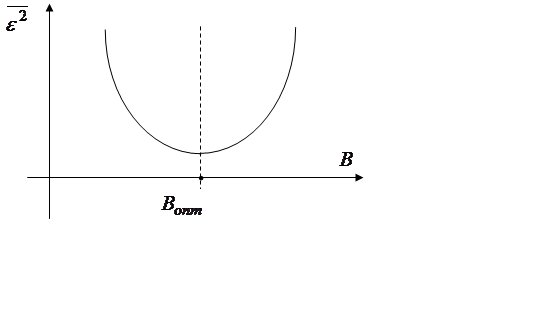
 . Зависимость
. Зависимость  называется рабочей функцией системы.
Она имеет квадратичный характер и один минимум при
называется рабочей функцией системы.
Она имеет квадратичный характер и один минимум при ![]() :
:
Найдём производную и приравняем её к нулю:
 .
.
Производная Ñ называется градиентом рабочей функции.
Из уравнения при Ñ=0 следует:
 .
.
Используем
обозначения ![]() и
и  .
.
В результате получаем следующее уравнение:
![]()
Это матричное уравнение Винера-Хопфа. Из него находим:
- винеровский оптимальный вектор весовых коэффициентов.
В
данных выражениях Р это ВКФ сигналов d(n) u x(n) , R – АКФ (матрица) входного сигнала. В качестве
неизвестных значений R u P
используют их статистические оценки ![]() и
и ![]() , вычисляемые по реализациям конечной
длины N, т.е.
, вычисляемые по реализациям конечной
длины N, т.е.
 .
.
Данный алгоритм требует очень большого объема вычислений. В связи с этим на практике применяют более простые итерационные градиентные алгоритмы.
3. Итерационные градиентные алгоритмы настройки весовых коэффициентов АНФ
а) Итерационный алгоритм адаптации Ньютона.
Этот алгоритм вытекает из определения градиента и уравнения Винера – Хопфа. Запишем выражение для градиента рабочей функции:
![]() .
.
Помножим
![]() на
на  :
:
*![]() =
=
Отсюда получаем: 
![]() .
Этому соответствует итерационное соотношение:
.
Этому соответствует итерационное соотношение: 
 , представляющее итерационный
алгоритм адаптации Ньютона. Для вычисления весовых коэффициентов необходимо
знать значения
, представляющее итерационный
алгоритм адаптации Ньютона. Для вычисления весовых коэффициентов необходимо
знать значения ![]() и
и ![]() на
n-м шаге. Если известен вектор ВК
на
n-м шаге. Если известен вектор ВК ![]() на n-м шаге и
точные значения АКФ
на n-м шаге и
точные значения АКФ ![]() и градиента
и градиента![]() , то оптимальный вектор ВК можно
найти за один шаг.
, то оптимальный вектор ВК можно
найти за один шаг.
б) Обобщенный итерационный алгоритм Ньютона:
Этому алгоритму отвечает итерационное соотношение
![]() ,
,
в
котором с помощью коэффициента ![]() регулируется
сходимость и скорость процесса адаптации при неточно известных значениях
регулируется
сходимость и скорость процесса адаптации при неточно известных значениях ![]() и
и ![]() .
.
в) итерационный алгоритм наискорейшего спуска.
Здесь
полагается, что ![]() =
= ![]() -
единичная матрица. Тогда
-
единичная матрица. Тогда
![]() .
.
Неизвестным является только градиент рабочей функции.
г) итерационный алгоритм адаптации по методу МНК
(алгоритм МНК).
Данный алгоритм определяется следующим образом:
![]() ,
,
где ![]() -
оценка градиента. Её находят исходя из предпосылки
-
оценка градиента. Её находят исходя из предпосылки 
По определению  Тогда
Тогда 
и  .
.
В результате получается следующий итерационный алгоритм:
![]() .
.
В развёрнутом виде он выглядит следующим образом:
![]()
![]()
.
.
![]()
Оценим объём вычислений:
![]()
![]() +1.
Всего:
+1.
Всего: ![]() +1.
+1.
Чем
меньше значение ![]() , тем выше сходимость
алгоритма, но больше время адаптации и наоборот.
, тем выше сходимость
алгоритма, но больше время адаптации и наоборот.
Данный алгоритм в силу его простоты находит наибольшее практическое применение.
Максимальное
значение  - обратно
пропорционально дисперсии сигнала. Оценку дисперсии можно получить
непосредственно в процессе обработки по разностному уравнению, соответствующему
РФ 1-го порядка :
- обратно
пропорционально дисперсии сигнала. Оценку дисперсии можно получить
непосредственно в процессе обработки по разностному уравнению, соответствующему
РФ 1-го порядка :
 ,
где
,
где ![]() - константа, определяющая качество
фильтрации (сглаживания). Коэффициенты фильтра сходятся к их оптимальным
значениям и колеблются относительно их с амплитудой, пропорциональной
- константа, определяющая качество
фильтрации (сглаживания). Коэффициенты фильтра сходятся к их оптимальным
значениям и колеблются относительно их с амплитудой, пропорциональной ![]() .
.
Время
установления (адаптации)  ;
;
Для
уменьшения объема вычислений часто полагают  или
или
![]() . Кроме того, вместо значений
. Кроме того, вместо значений ![]() и
и ![]() используют
знаковые функции
используют
знаковые функции ![]() и
и ![]() .
.
4. Адаптивный Нерекурсивный Фильтр
как линейное предсказывающее устройство
Адаптивные линейные предсказывающие устройства (ЛПУ) применяется для оптимальной оценки параметров сигналов, при анализе–синтезе речи, для спектрального анализа, подавления помех, фильтрации и обнаружения сигналов и др.
Различают ЛПУ с предсказанием вперёд, назад, на один шаг, на М шагов.
Общая структура ЛПУ с предсказанием вперёд на один шаг имеет вид:
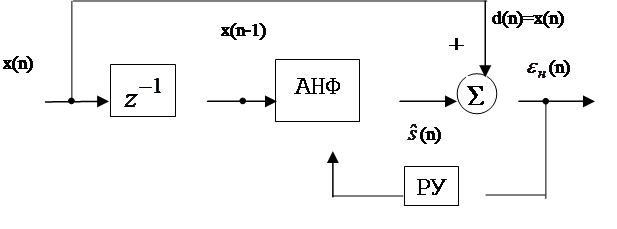 |
Здесь обучающий сигнал d(n) = x(n), а
сигнал y(n) на выходе АНФ является предсказанным на один шаг
значением входного сигнала x(n), т. е. его оптимальной оценкой: y(n) = ![]() .
.
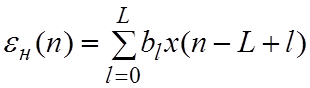
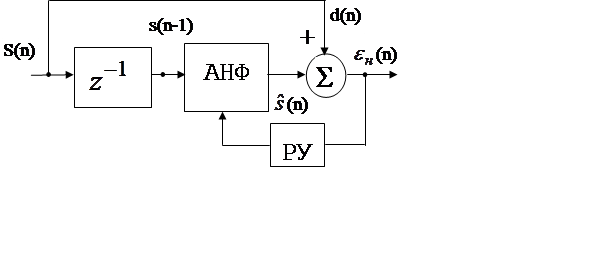
На следующем рисунке приведена развернутая структура ЛПУ на основе адаптивного нерекурсивного фильтра.
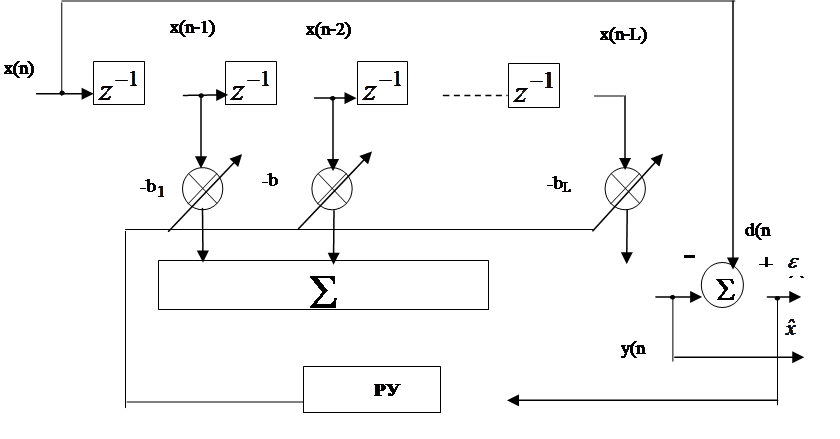 |
Здесь
 - предсказанное
значение или оптимальная оценка очередного отсчёта сигнала.
- предсказанное
значение или оптимальная оценка очередного отсчёта сигнала.
 .
.
Коэффициенты
![]() рассчитываются из условия минимума
СКО
рассчитываются из условия минимума
СКО ![]() (по методу МНК). Возможно также
предсказание на М отсчётов (шагов) вперёд.
(по методу МНК). Возможно также
предсказание на М отсчётов (шагов) вперёд.
Передаточные функции ЛПУ:

![]() . Пример:
. Пример:
 |
|||
 |
|||
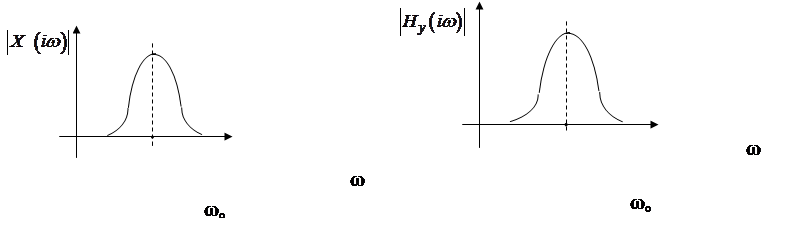
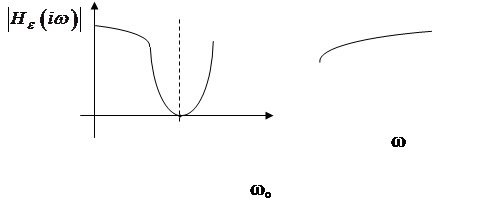
Если
мы хотим выделить сигнал с частотой w0, нужно использовать выход ![]() ,
если подавить – выход
,
если подавить – выход ![]() .
.
Это свойство ЛПУ применяется для оптимальной фильтрации сигналов.
Используется также АНФ предсказания назад:
 |
Такой фильтр описывается уравнениями:

 ;
;
![]() .
.
Общая ошибка предсказания равна сумме квадратов ошибок предсказания вперёд и назад:
По минимуму этой ошибки также осуществляется оптимальная настройка коэффициентов фильтра.
5. Применение ЛПУ для анализа – синтеза речи
Данное применение ЛПУ основывается на цифровой модели речеобразования, имеющей следующий вид.
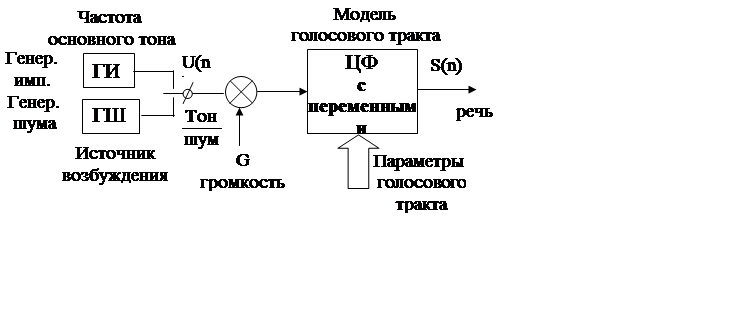 |
Она состоит из источника возбуждения и ЦФ.
Источник возбуждения для вокализованных звуков – ГИ с частотой основного тона;
для невокализованных – генератор шума ГШ.
ЦФ определяет модель голосового тракта.
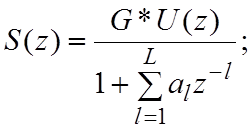
В качестве моделирующего ЦФ используется РФ без нулей (модель авто регрессии -
АР-модель):
 .
.
![]() -
коэффициенты модели.
-
коэффициенты модели.
Анализ речи: для анализа речи используется ЛПУ, т. е. АНФ:
 |
![]() ;
;  ;
;
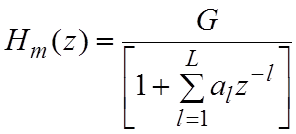
передаточная функция фильтра:
 .
.
При
![]()
 -
такой фильтр называют обратным или отбеливающим. При этом
-
такой фильтр называют обратным или отбеливающим. При этом ![]() и
и ![]() .
.
![]() - это непредсказуемая часть сигнала,
т.е. белый шум.
- это непредсказуемая часть сигнала,
т.е. белый шум.
Таким
образом, сигнал ошибки ![]() соответствует сигналу
возбуждения, а коэффициенты ЛПУ соответствуют коэффициентам АР-модели.
соответствует сигналу
возбуждения, а коэффициенты ЛПУ соответствуют коэффициентам АР-модели.
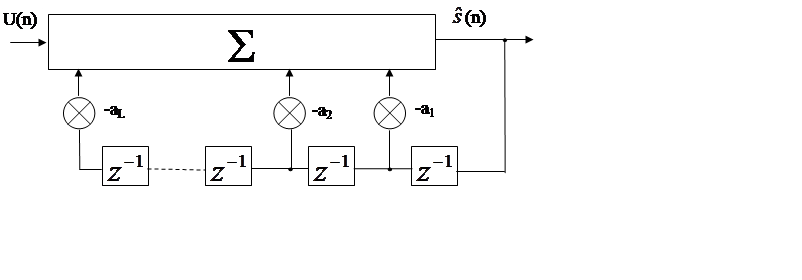
Синтез речи:
Осуществляется с помощью РФ без нулей с коэффициентами ![]() ,
возбуждаемого либо от ГИ, либо от ГШ:
,
возбуждаемого либо от ГИ, либо от ГШ:
 |
Системы анализа-синтеза речи используются в качестве вокодеров в системах связи для сжатия речевого сигнала и его низкоскоростной передачи : V=(2400-9600) бит/с вместо 64000 бит/c при ИКМ. По каналу связи через каждые 20 мс приращения значений коэффициентов фильтра , тип возбуждения и параметры. При V=2400 бит/c за 20 мс за 20 мс передаётся всего 48 Кбит информации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




