САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСТИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ИНЖЕНЕРНО СТРОИТЕЛЬНЫЙ ФАКУЛЬТЕТ
КАФЕДРА УПРАВЛЕНИЕ И ИНФОРМАТИКА В ТЕХНИЧЕСКИХ СИСТЕМАХ
по дисциплине
МОДЕЛИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
АНАЛИЗ И МОДЕЛИРОВАНИЕ КОЛОКОЛЬНОГО ДИФМАНОМЕТРА КАК СИСТЕМЫ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
Выполнил: гр.УИТ-41
Печавин А. В.
Принял
преподаватель каф. УИТ
Мефедова Ю. А.
“______” ______________2005
2005
Содержание
Введение .................................................................................................................... 3
1 Моделирование колокольного дифманометра на макроуровне ........................ 4
1.1 Описание устройства и принцип действия ....................................................... 4
1.2 Динамические характеристики .......................................................................... 6
2 Моделирование колокольного дифманометра на микроуровне .......................10
2.1 Основные понятия СРП .....................................................................................11
2.2 Представление колокольного дифманометра в виде элементарных
блоков ........................................................................................................................12
2.3 Выбор и идентификация уравнения .................................................................13
3 Расчет выходной величины ..................................................................................16
4 Расчет интегральной передаточной функции .....................................................18
5 Построение логарифмических характеристик. Синтез
аппроксимированной передаточной функции ......................................................19
Заключение ...............................................................................................................20
Список используемой литературы .........................................................................21
ВВЕДЕНИЕ
Существуют среды, которые не могут быть математически описаны в пространстве сосредоточенных параметров (например, электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т. д.) .
Системой с распределенными параметрами (СРП) называется система, в которой практически все сигналы (в первую очередь – входной и выходной) являются функциями пространственных координат и времени.
Математически СРП описываются дифференциальными уравнениями в частных производных. Также для этого вводятся функции Грина, континуальная и интегральная передаточные функции.
Система с сосредоточенными параметрами (ССП) является частным случаем СРП и вводится для упрощения и решения задач на первом этапе. В большинстве случаев такого упрощения оказывается достаточно для получения адекватных результатов, но в ряде задач распределение параметров в пространстве оказывает существенное воздействие на результаты. В этом случае применяется аппарат теории СРП.
Целью работы является синтез интегральной передаточной функции для объектов управления с распределенными параметрами. В данной работе решается вопрос построения математической модели колокольного дифманометра на основе теории распределенных сигналов.
1 МОДЕЛИРОВАНИЕ КОЛОКОЛЬНОГО ДИФМАНОМЕТРА НА МАКРОУРОВНЕ
1.1 Описание устройства и принцип действия
Колокольные дифманометры используются для измерения низких давлений и разряжений (тягомеры и напоромеры) и в качестве дифференциальных манометров.
В колокольных манометрах разность уровней, создаваемая перепадом давления, определяет по высоте положение колокола, частично погруженного в жидкость. Перемещение колокола больше значения разности уровне, что делает их чувствительными к изменению давления. Изменение давления уравновешивается гидростатически при изменении глубины погружения колокола.
 |
5
 |
4
 |
2
![]()
 3
3
1
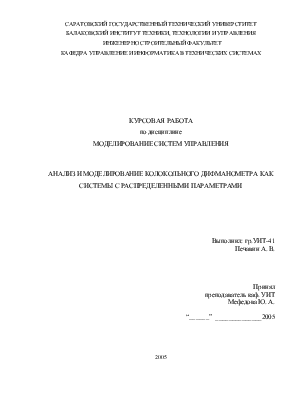
Рис. 1 Колокольный дифманометр с индуктивным преобразователем
В жидкость в сосуде 1 погружен колокол 2. Под колокол по трубке 3 подается измеряемое давление Р. Пространство над колоколом находится под атмосферным давлением РАТМ. Под влияние ∆Р = Р - РАТМ появляется усилие, перемещающее колокол вверх. Для получения однозначной зависимости перемещения колокола от ∆Р используется колокол с толстостенными стенками. Тогда при увеличении давления Р колокол будет подниматься до тех пор, пока усилие не уравновесится выталкивающей силой. Для равновесия:
 ∆Р = Н(ρ1 – ρ2)gFС, или Н = ,
∆Р = Н(ρ1 – ρ2)gFС, или Н = ,
где F и FC площадь дна колокола и кольцевого сечения его стенок;
Н – высота подъема колокола под действием ∆Р;
ρ1 и ρ2 – плотность жидкости и среды над колоколом.
Железный сердечник 5 укрепляется с помощью стержня 4 непосредственно на колоколе 2.
Линейное перемещение колокола в индуктивном преобразователе преобразуется в электрический сигнал. Электрическая катушка преобразователя средним выводом разделена на две электрически подобные части. Принцип действия индуктивного преобразователя основан на изменении индуктивности катушки при линейном перемещении чувствительного элемента (колокол). При изменении индуктивности меняется электрическое сопротивление катушки, что приводит к изменению электрического тока.
Дифманометры колокольной системы характеризуются наличием колокола (одного или двух), погруженного в жидкость и перемещающегося под влиянием измеряемой разности давлений.
При наличии только одного колокола большее давление подается обычно внутрь колокола, а меньшее действует снаружи. При наличии двух колоколов, подвешенных на общем коромысле, под один из колоколов подается большее давление, а под другой – меньшее.
Противодействующая сила в колокольных дифманометрах создается двумя способами: за счет утяжеления колокола при его объеме и, следовательно, уменьшения глубины его погружения в жидкость (способ гидростатического уравновешивания) или за счет деформации пружины или изменения момента (способ механического уравновешивания).
В первом случае колокол является толстостенным, т. е. отличается большой величиной площади поперечного сечения. Во втором случае колокол тонкостенный. Пространство над колоколами находится под атмосферным давлением.
Основным достоинством колокольных дифманометров является высокая чувствительность. Это предопределило их преимущественное распространение при измерении расхода газа, имеющего небольшое статическое давление. Предельно допустимые избыточные давления для них равны 0,6 и 2,5 кгс/см2 (0,06 и 0,25 Мпа), а предельные номинальные перепады должны быть в пределах от 10 до 100 кгс/м2 (от 100 до 1000 Па).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.