САРАТОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
по теме:
МОДЕЛИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ КООРДИНАТ
Выполнил
ст. группы УИТ6В
Бисенов Ю.К.
Проверил
Николаенко Ю.В.
Балаково 2011
Данные:
Uном=60; Rя=0.94; Lя=0.038; J=0.00153; 𝝎н=209; Iн=2.27; Mном=0.49; kп=50;
T п=0.008; kос=0.048; kот=4.405
Расчитаем kE и kM:
Модель двигателя:
Графики изменения угловой скорости и тока якоря для модели двигателя
Время переходного процесса для угловой скорости tω≈0,4 с, а для тока якоря также tI≈0,4 с.
Рассчитаем корректирующие коэффициенты:
![]() .
.
![]() .
.
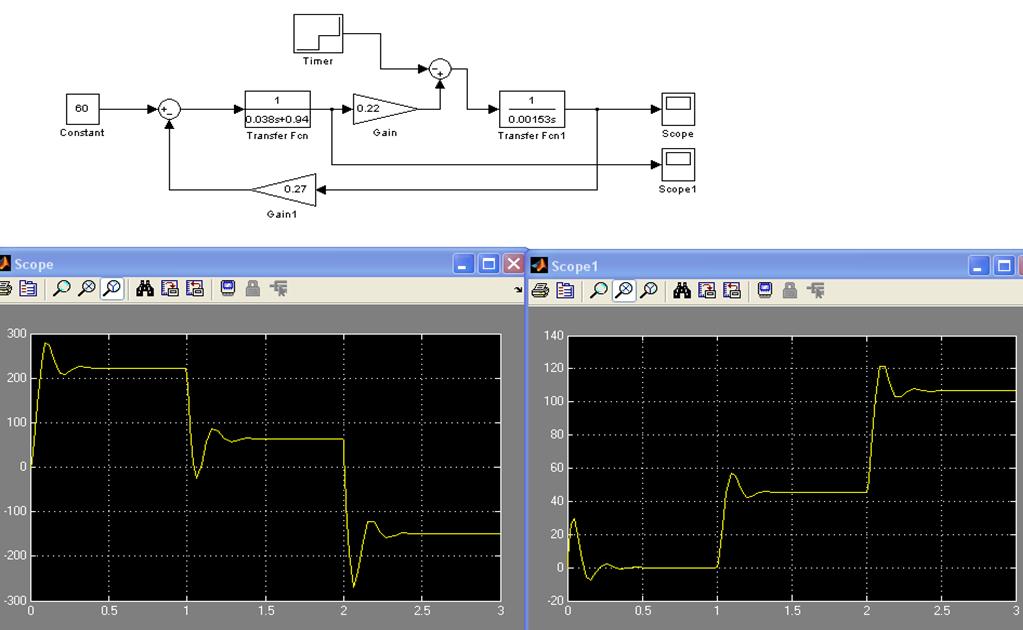
Модель двигателя и электропривода с двумя обратными связями
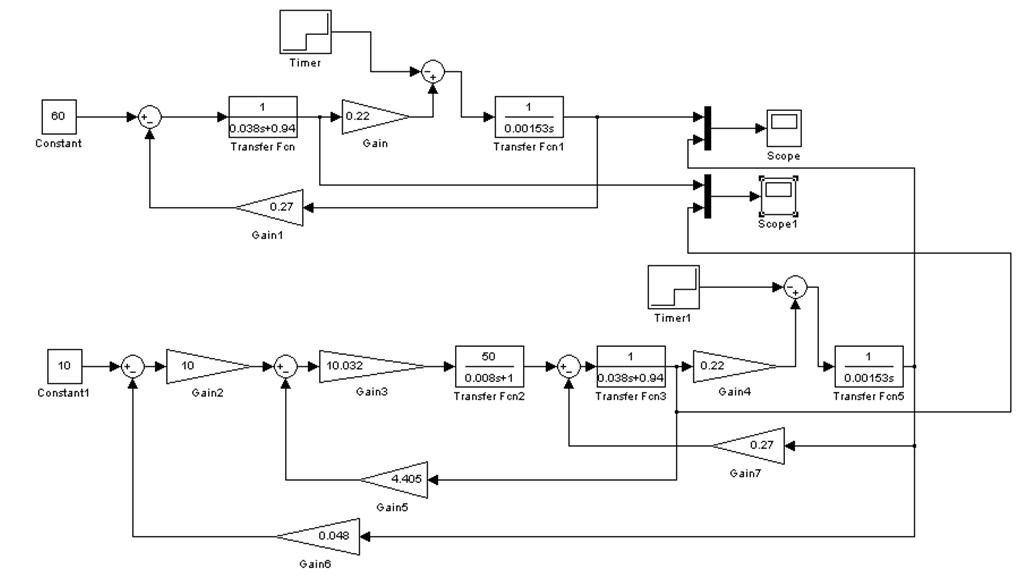
Графики изменения угловой скорости и тока якоря
двигателя и электропривода 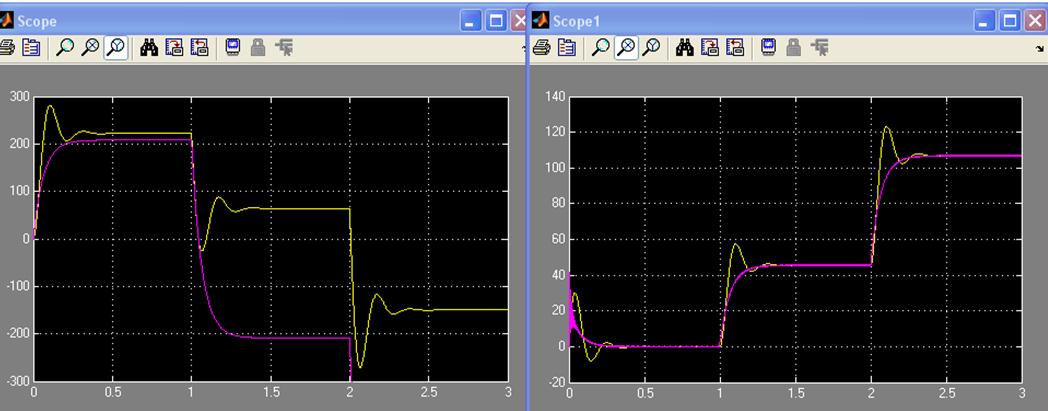
Для угловой скорости появилась статическая ошибка, которая для номинального режима равна:
![]()
Для тока якоря статической ошибки не наблюдается.
Время переходного процесса для тока и скорости при организации обратных связей не изменилось.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

