Теория СРП включает структурный метод ТАУ, который подразумевает операции с распределенными блоками: если блоки соединяются последовательно; если блоки соединяются параллельно; при включении второго блока в обратную связь. В связи с этим вводится понятие операторного изображения выходной величины. В теории распределенных блоков выходная величина определяется следующим образом:
 , (14)
, (14)
где ![]() - изображение по Лапласу выходной
величины решаемой задачи;
- изображение по Лапласу выходной
величины решаемой задачи; ![]() - континуальная
передаточная функция;
- континуальная
передаточная функция; ![]() - изображение по
Лапласу нормирующей функции.
- изображение по
Лапласу нормирующей функции.
Если удается
из нормирующей функции ![]() выделить в явном виде
компоненту входной координаты с помощью специальных средств или методов
выделить в явном виде
компоненту входной координаты с помощью специальных средств или методов
![]() , (15)
, (15)
то уравнение (14) перепишется в виде:
 , (16)
, (16)
С помощью двух способов (коэффициент разложения и коэффициент приближения) по возможности выносится входное возмущение (по Лапласу) за знак интегрирования, получим:
 (17)
(17)
Полученное выражение (17) - отношение изображения по Лапласу выходной величины к изображению по Лапласу входного возмущения, как интеграл по области Dконтинуальных функций, называется интегральной передаточной функцией (функция Власова В.В.).
4 Синтез интегральной передаточной функции СРП
Рассмотрим, как изменяется сопротивление Q платиновой нити 1 при изменении температуры X (рисунок 1).
Исходные данные:
Кроме того:
Для начала расчетов проведем идентификацию всех присутствующих величин. Входным возмущением f(x, t) является поток тепла от корпуса металлического терморезистора, который при некотором пренебрежении временем равен потоку тепла от источника тепла, приложенного к нити в точке 0, зададим его в качестве гармонического сигнала: f(x, t)=A*cos(ωt). Сразу зададим коэффициенты входного воздействия. Ограничим температуру значением 1000С, частоту изменения входного воздействия примем равной 314 Гц.
Координата точки ξ, в которой нужно найти значение выходной величины как функции от возмущения и 0≤ξ≤l. Введем ограничение на длину нити 8 сантиметрами.
Q – выходная величина, соответствующая сопротивлению нити после воздействия на него теплового потока.
Начальные условия запишутся в виде Q(x,0)=Q0(x)=4300, что соответствует сопротивлению проводника при 200С.
Граничные условия имеют вид:
Q(1,t)=g1(t)=4300*(1+5.49*10-3*100*cos(314*t)+6.66*10-6(100*cos(314* *t))2)=4300+2361*cos(314*t)+286.38*cos2(314*t)
Q(l,t)=g2(t)=4300*(1+5.49*10-3*100*cos(314*t+50)+6.66*10-6(100* *cos(314*t+50))2)=4300+2361*cos(314*t+50)+286.38*cos2(314*t+50)
Все дополнительные данные взяты из теоретической части.
Выходная величина запишется в виде:

Таким образом, стандартизирующая функция запишется как:
 Для определения интегральной
передаточной функции необходимо найти операторное выражение выходной величины.
Для определения интегральной
передаточной функции необходимо найти операторное выражение выходной величины.
Континуальная передаточная функция примет вид:

С соблюдением наложенных ограничений континуальная передаточная функция примет вид:

Для дальнейших расчетов найдем изображение по Лапласу для нормирующей функции:
 Вычислим
значение этого уравнение в среде MathCad и выделим компоненту
входной координаты:
Вычислим
значение этого уравнение в среде MathCad и выделим компоненту
входной координаты:

Таким образом, операторное изображение выходной величины запишется как:
 Интегральная передаточная функция
перепишется в виде:
Интегральная передаточная функция
перепишется в виде:
Длина нити конкретная и равна 8.
Ввиду явной неразрешимости интеграла, в котором присутствует сумма ряда до бесконечного члена, введем ограничение на количество рядов 1, т.е. возьмем первый член ряда. Эта мера является вынужденной и ведет к большой погрешности.
Таким образом, учитывая принятые меры, получим уравнение:
Путем применения пакета MathCad, была получена следующая форма передаточной функции:
Координата x пробегает по длине стержня, однако можно предположить, что закон изменения состояния провода одинаков для всей его длины и отличается лишь коэффициентами. Будет правильным приравнять x к какому либо числу, например 8 (конечная точка).
После ряда упрощений и замены p на jω, было получено уравнение:
 Действительная часть:
Действительная часть:




Мнимая часть:



Логарифмическую амплитудно-частотную характеристику строим согласно формуле:
Сопрягающие частоты:
ω1=1 Гц Т1=1 с
ω2=10 Гц Т2=0.5 с
ω3=150 Гц Т3=0.0067 с
ω4=200 Гц Т4=0.005 с
ω5=300 Гц Т5=0.0033 с
Коэффициент: K1=108. Т.е. аппроксимированная передаточная
функция запишется в виде: 
На рисунке 7 представлены ЛАЧХ: фактическая (L(ω)) и аппроксимированная (N(ω)).
Рисунок 7
Логарифмическую фаза-частотную характеристику, строим согласно формуле:
График аппроксимированной ЛФЧХ строится по формуле:
![]()
Графики ЛФЧХ представлены на рисунке 8, где Ψ(ω)-фактическая, S(ω)-аппроксимированная ЛФЧХ.
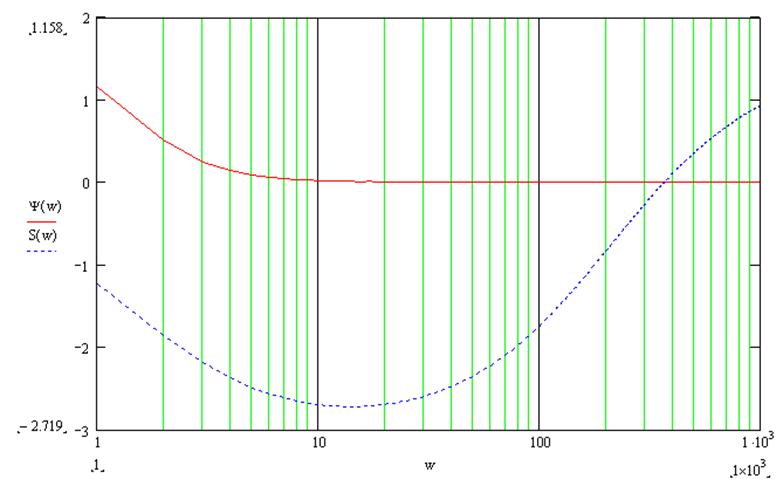
Рисунок 8
ЗАКЛЮЧЕНИЕ
В ходе курсовой работы было рассмотрено устройство металлического терморезистора, была получена передаточная функция устройства. В дальнейшем была получена передаточная функция платиновой нити (составной части терморезистора), которая отличалась от передаточной функции всего устройства. Таким образом, обнаружено действие СРП и ССП, которые в сумме дают известную передаточную функции, в отдельности далеки от нее. Кроме того, были построены ЛАЧХ и ЛФЧХ нити, которые также далеки от подобных характеристик металлического терморезистора в целом.
В целом была на практике изучена методика исследования системы с распределенными параметрами
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1 Бутковский А.Г. Характеристики систем с распределенными параметрами. - М.: Наука, 1979. -224с.
2 Власов В.В. Синтез интегральной передаточной функции для объектов управления с распределенными параметрами // Школа академика Власова: Сб. метод, тр - М.: Буркин, 1998. -128с.
3 Бесекерский В.А., Попов Н.П. Теория систем автоматического регулирования. М.: Наука. 1966. -992с.
4 Топчеев Ю.И Атлас для проектирования систем автоматического регулирования. - М: Наука. 1989. -752с.
5 Чемоданов Б.К., Иванов В.А., Медведев B.C., Юшенко А.С. Математические основы теории автоматического регулирования. Том 1 - М.: Высшая школа, 1977. -366с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.