Задание 5. Математическое описание линейных систем
Пусть
![]()
Передаточная функция системы ![]() – это
отношение изображения по Лапласу сигнала на выходе к изображению по Лапласу
сигнала на входе при нулевых начальных условиях.
– это
отношение изображения по Лапласу сигнала на выходе к изображению по Лапласу
сигнала на входе при нулевых начальных условиях.
Создадим стационарный линейный объект с именем w в пакете Matlab
>> w = tf ([144 288], [1 15 62 48])
Transfer function:
144 s + 288
-----------------------s^3 + 15 s^2 + 62 s + 48
Чтобы перейти от передаточной функции к дифференциальному уравнению системы, нужно перейти из области изображений по Лапласу во временную область. Из (4.1)следует:

Для перехода во временную область воспользуемся формальными правилами:

Тогда дифференциальное уравнение системы имеет вид
![]() (1.1)
(1.1)
Характеристическое уравнение системы определяется знаменателем передаточной функции
![]()
Один из корней уравнения можно найти подбором, это
будет ![]() а затем понизить порядок уравнения и решить его
а затем понизить порядок уравнения и решить его
Итак, ![]() тогда
тогда ![]()
![]()
![]()
В пакете Matlab корни многочлена можно найти с помощью команды pole(w).
Matlab
>> pole(w)
ans =
-8.0000
-6.0000
-1.0000
Передаточная функция системы в форме нулей и полюсов имеет вид

Получим разложение передаточной функции на сумму простых слагаемых
![]()
Найдем a, b, c :

Следовательно,
Получим систему уравнений:
В результате решения данной системы уравнений получим
![]()
![]()
![]()
![]() .
.
Импульсная переходная характеристика w(t) – это процесс изменения сигнала на выходе при подаче на вход δ-функции. Ее можно найти в результате обратного преобразования Лапласа, примененного к каждому слагаемому передаточной функции.
В
соответствии с таблицами соответствия  тогда
тогда
![]()
Matlab
>> ch=[144 288]
>> zn=[1 15 62 48]
>> [x]=residue(ch,zn)
x =
-61.7143
57.6000
4.1143
Переходная характеристика h(t) – это процесс изменения сигнала на выходе системы
при подаче на вход единичного ступенчатого воздействия. Преобразование по
Лапласу 1(t) это
![]()
![]()
Для получения аналитической формы переходной характеристики дополним систему интегратором:

С помощью метода неопределенных коэффициентов аналогично найдем а = -4,114; b = -9,6; c = 7,714; d = 6.
Matlab
>> ch=[144 288]
>> zn=[1 15 62 48]
>> [c]=residue(ch,[zn,0])
c =
7.7143
-9.6000
-4.1143
6.0000
Запишем аналитическую форму переходной характеристики
![]()
![]()
Переходную характеристику можно также вычислить следующим
образом  получим
такой же результат.
получим
такой же результат.
Временные характеристики системы, построенные в пакете Matlab, приведены на рис. 1.1 и 1.2.
График h(t)
>> step(w)
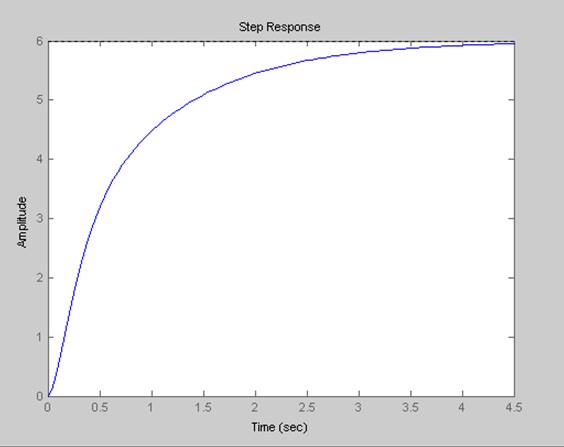
Рис. 1.1
График w(t)
>> impulse(w)
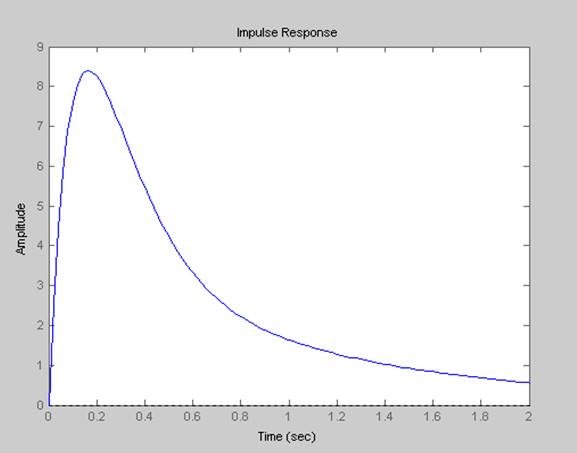
Рис. 1.2
Построение асимптотических ЛАХ и ФЧХ. При определении частотных характеристик подразумевается, что на входе и выходе системы сигналы являются гармоническими.
Амплитудно-частотная характеристика (АЧХ) показывает, как изменяется отношение выходного сигнала к входному в зависимости от частоты.
Фазо-частотная характеристика (ФЧХ) показывает изменение сдвига фаз между входным и выходным сигналами в зависимости от частоты.
ЛАЧХ строится в двойных логарифмических шкалах. По
одной логарифмической оси откладывается круговая частота ![]() , по другой значение
, по другой значение ![]() ,
выраженное в децибелах. Асимптотическая ЛАЧХ состоит из отрезков прямых линий с
наклонами кратными 20 дБ/дек.
,
выраженное в децибелах. Асимптотическая ЛАЧХ состоит из отрезков прямых линий с
наклонами кратными 20 дБ/дек.
Преобразуем передаточную функцию к следующему виду:
Теперь она представляет собой произведение трёх
апериодических и одного форсирующего звена с постоянным времени ![]()
![]()
![]()
![]() Коэффициент
усиления К = 6. Сопрягающие
частоты звеньев равны
Коэффициент
усиления К = 6. Сопрягающие
частоты звеньев равны 
Далее необходимо правильно разметить оси, и отметить на оси w сопрягающие частоты. ЛАЧХ приведена на рис. 1.3, а.
Так как интегрирующие звенья отсутствуют, то первый наклон в области низких частот будет нулевой. Он идёт параллельно оси частот на уровне 20 lgK до первой сопрягающей частоты w1. Эта частота относится к апериодическому звену. Следовательно, наклон изменится на -1. Этот наклон будет идти до сопрягающей частоты w2. Так как эта частота относится к форсирующему звену, то наклон изменится на +1 и станет нулевым, ЛАЧХ параллельна оси частот. После частоты w3 наклон изменится на (-1) и будет продолжаться до w4. После частоты w4 он изменится ещё на (-1) и станет равным (-2). Частота, при которой частотная характеристика пересечёт ось частот, называется частотой среза, wср = 12 рад/с.
Фазочастотная характеристика (рис. 1.3, б) построена в соответствии с выражением
![]()
Значения каждого из слагаемых определяются
приближенно для значений ![]() ,
,
![]()
 .
В этих точках
.
В этих точках ![]()
![]()
В пакете Matlab для построения ЛАЧХ и ЛФЧХ используется команда bode(w), а для построения АФЧХ команда nyquist(w). Соответствующие характеристики приведены на рис. 1.4 и 1.5.
а
б
Рис. 1.3
ЛАЧХ и ЛФЧХ системы
>>margin(w)
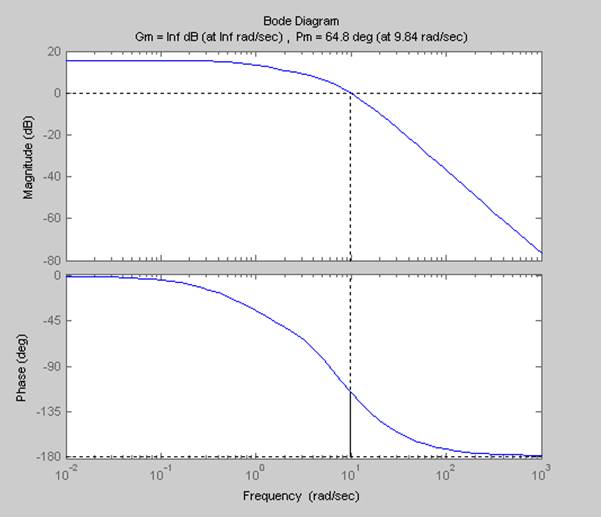
Рис. 1.4
АФЧХ системы:
>> nyquist(w)
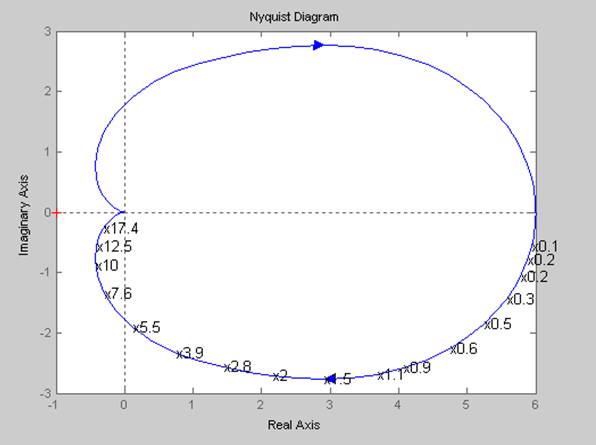
Рис. 1.5
Кроме входных и выходных переменных при описании систем выделяют переменные x, связанные с внутренней структурой устройства – переменные состояния. Тогда систему можно описать с помощью уравнений состояния.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.