

Раздел 5. Кинематика движения агрегата
Кинематика агрегата изучает геометрию формы его движения. При нерациональном способе движения соотношение холостых и рабочих ходов может приводить к значительному снижению экономичности работы МТА.
Способом движения называют порядок циклично повторяющегося перемещения агрегата в процессе выполнения работы.
Для определенного вида лесохозяйственных работ существует несколько способов движения агрегатов, но применять следует тот, который в данных условиях обеспечивает максимальный эффект.
Траектория движения агрегата обычно состоит из отрезков прямолинейного движения и поворота вокруг некоторого центра. Движение по прямой или рабочий ход, является главным элементом кинематики агрегата.
Поворот – это сложное движение по кривой с переменным радиусом кривизны. Отдельные точки агрегата при этом описывают свои траектории, и скорости их движения изменяются в зависимости от расстояния до центра поворота.
Длиной выезда агрегата (l) называется расстояние от его центра до линии расположения рабочих органов орудия. На эту длину необходимо перемещать агрегат в конце и начале рабочего хода до контрольной линии начала разворота агрегата.
Траектория поворота агрегата – кривая, состоящая из элементов различной формы и кривизны. Движение агрегата на повороте можно считать практически оптимальным при установившемся движении с постоянным радиусом поворота, дающим длину дуги, близкую к действительной траектории движения.
Минимальным радиусом поворота агрегата называется наименьший радиус окружности, движение по которой при данных условиях допускается конструктивными параметрами агрегата без деформации движителя и поверхности движения, т. е. без повреждений машины и окружающей среды. Этот показатель зависит от наименьшего радиуса поворота трактора, конструкции сцепки и орудия, а также от габаритов агрегата по ширине и длине. Движение на повышенной скорости, по влажной или рыхлой почве приводит к увеличению радиуса поворота. Наименьший радиус поворота Rmin зависит и от квалификации тракториста-машиниста. Для навесных агрегатов наименьший допустимый радиус поворота близок по величине к наименьшему радиусу поворота трактора.
При выполнении большинства видов работ в лесном хозяйстве машинно-тракторные агрегаты (МТА) двигаются циклично. Движение МТА включает рабочие ходы, при которых выполняется полезная работа, и холостые ходы, связанные с необходимостью поворота агрегатов и обеспечением рабочих ходов движения МТА.
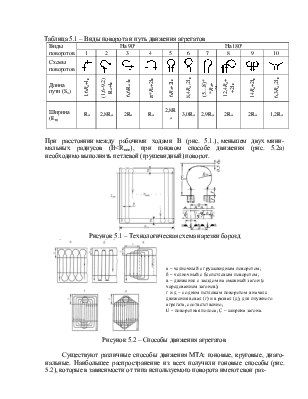
В практике встречаются различные виды поворотов (табл. 5.1) – это беспетлевой 1, петлевой 2, перекрестно-петлевой 3; повороты на 180 – беспетлевой 4, петлевой 5, перекрестно-петлевой 6, односторонне-петлевой 7, согнуто-петлевой 8, сдвоенный петлевой 9 и возвратно-петлевой 10.
Таблица 5.1 – Виды поворота и путь движения агрегатов
|
Виды поворотов |
На 90° |
На 180° |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
Схемы поворотов |
|
|
|
|
|
|
|
|
|
|
|
Длина пути (Sx) |
1,6Rа+lв |
(1,6-9,2) Rа+lв |
6,6Rа+lв |
π*Rа+2lв |
6Rа+2lв |
8,4Rа+2lв |
(5…8)* *Rа+ +2lB |
12,4Rа+ +2lв |
14Rа+2lв |
6,3Rа+2lв |
|
Ширина (Eп) |
Rа |
2,8Rа |
2Rа |
Rа |
2,8Rа |
3,0Rа |
2,9Rа |
2Rа |
2Rа |
1,2Rа |
При расстоянии между рабочими ходами В (рис. 5.1.), меньшем двух мини-мальных радиусов (В<Rmin), при гоновом способе движения (рис. 5.2а) необходимо выполнять петлевой (грушевидный) поворот.
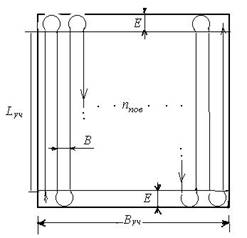
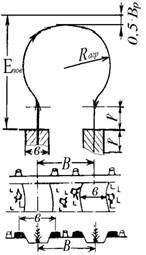
Рисунок 5.1 – Технологическая схема нарезки борозд
а – челночный с грушевидным поворотом;
б – челночный с беспетлевым поворотом;
в – движение с заездом на смежный загон (с чередованием загонов);
г и д – с одним петлевым поворотом в начале движения всвал (г) и в развал (д), для плужного агрегата, соответственно;
Е – поворотная полоса; С – ширина загона.
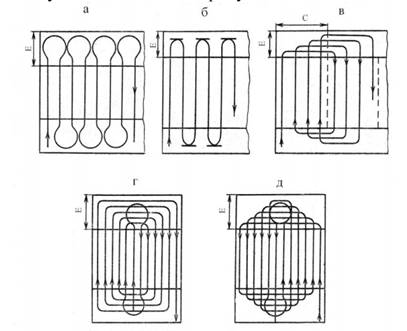
Рисунок 5.2 – Способы движения агрегатов
Существуют различные способы движения МТА: гоновые, круговые, диаго-нальные. Наибольшее распространение из всех получили гоновые способы (рис. 5.2), которые в зависимости от типа используемого поворота имеют свои разновидности. Для выполнения работ необходимо выбрать наиболее экономичный способ движения машинно-тракторного агрегата. Оценочным показателем способа движения является коэффициент рабочих ходов φр. х, который определяется по формуле:
где ƩSp – суммарная длина рабочих ходов, м; ƩSx – суммарная длина холостых ходов, м.
Суммарная длина рабочих ходов:
![]()
где F – площадь обрабатываемого участка, м2; В – расстояние в м между рабочими ходами (рис. 5.1).
![]()
где ƩSxi – длина холостого хода при i-м повороте, м (табл. 5.1);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.