Е = С'Фп, (1)
где ![]() -
конструктивная постоянная тягового двигателя; Ф - магнитный поток; п -
частота вращения якоря.
-
конструктивная постоянная тягового двигателя; Ф - магнитный поток; п -
частота вращения якоря.
В режиме тяги в двигателе происходит преобразование электрической энергии в механическую. Напряжение Uд, приложенное к двигателю, больше его электродвижущей силы, т. е. Uд > E. Уравнение электрического равновесия между приложенным к двигателю напряжением, электродвижущей силой и падением напряжения Irв силовой цепи будет иметь вид:
![]() (2)
(2)
где ![]() - падение напряжения под щетками двигателя.
- падение напряжения под щетками двигателя.
Величина ![]() = 1,0
= 1,0![]() 2,0В,
поэтому в практических расчетах этой составляющей напряжения пренебрегают.
2,0В,
поэтому в практических расчетах этой составляющей напряжения пренебрегают.
На основании уравнений (1) и (2) получаем выражение для частоты вращения якоря:
![]() , где I - ток якоря двигателя, А; r - активное сопротивление внутренней цепи двигателя, Ом;
С'Ф - магнитный поток главных полюсов двигателя, В/(об/мин).
, где I - ток якоря двигателя, А; r - активное сопротивление внутренней цепи двигателя, Ом;
С'Ф - магнитный поток главных полюсов двигателя, В/(об/мин).
Вращающий момент М является одним из основных параметров двигателя, так как он определяет ток, потребляемый двигателем, а следовательно, и его мощность. Вращающий момент двигателя может быть рассчитан из условия равенства полезной механической мощности Рм и подведенной электрической мощности, умноженной на к. п. д. двигателя. Полезная механическая мощность
![]() , где
, где ![]() -
угловая скорость якоря, рад/с.
-
угловая скорость якоря, рад/с.
Следовательно, полезную механическую мощность, Вт, можно выразить как:
![]() .
.
С другой стороны полезная электрическая мощность определяется как:
![]() .
.
Приравняв левые части выражений, получим:
откуда вращающий момент, Н·м,
![]() .
.
Вращающий момент М можно также определить по электромагнитному вращающему моменту Мэм т. е. моменту, который развивал бы двигатель при отсутствии механических и магнитных потерь:
М = Мэм - ΔM,
где ![]() -
электромагнитный момент, создаваемый электромагнитной мощностью Р =
EI; ΔM - момент,
создаваемый магнитными и механическими потерями
-
электромагнитный момент, создаваемый электромагнитной мощностью Р =
EI; ΔM - момент,
создаваемый магнитными и механическими потерями ![]() .
Следовательно, вращающий момент, Н∙м,
.
Следовательно, вращающий момент, Н∙м,
![]() .
.
Коэффициент полезного действия двигателя ηд представляет собой отношение полезной мощности к подведенной. При тяговом режиме это будет отношение полезной механической мощности Рм к электрической:
 , где
, где ![]() -
сумма соответственно электрических, механических и магнитных потерь в
двигателе.
-
сумма соответственно электрических, механических и магнитных потерь в
двигателе.
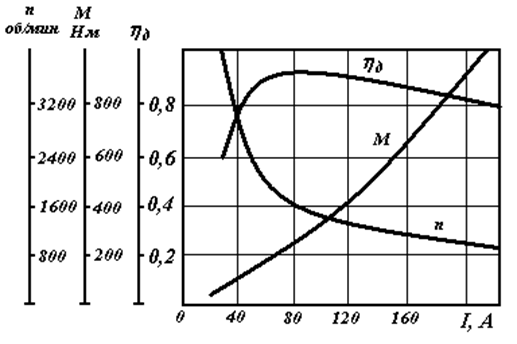
Рис. 1. Электромеханические характеристики на валу двигателя ДК-254Б
2) Электромеханические характеристики на ободе колеса.
Зависимости скорости v, силы тяги F и к. п. д. двигателя с учетом потерь энергии в передаче от тока двигателя называются электромеханическими характеристиками на ободе движущего колеса.Эти характеристики определяются не только свойствами тяговых двигателей, но и отдельными параметрами подвижного состава — диаметром движущего колеса DK, м, передаточным числом μ передачи от вала двигателя к движущей оси и коэффициентом полезного действия этой передачи η3.
Расчетные выражения для определения электромеханических характеристик на ободе движущего колеса. Для перехода от электромеханических характеристик на валу тягового двигателя кхарактеристикам на ободе колеса используются следующие соотношения:
скорость, км/ч,
![]() , (1)
, (1)
где коэффициент 3600/1000 введен для перевода м/с в км/ч;
сила тяги, Н,
![]() ; (2)
; (2)
к.п.д.
![]() . (3)
. (3)
В тяговых расчетах удобнее использовать относительные потери
мощности в передаче ![]() вместо
значения к, п. д. η3.. Относительные потери мощности в
передаче выражают в процентах от подведенной мощности:
вместо
значения к, п. д. η3.. Относительные потери мощности в
передаче выражают в процентах от подведенной мощности:
![]() , (4)
, (4)
где ![]() -
потери мощности в передаточных механизмах, Вт.
-
потери мощности в передаточных механизмах, Вт.
К.п.д. передачи
 . (5)
. (5)
Выражая потери мощности в передаточных механизмах ![]() через
относительные потери
через
относительные потери ![]() ,
получим
,
получим
![]() . (6)
. (6)
Подставив к. п. д. передачи из выражения (6) в выражение (3), получим
![]() (7)
(7)
Величина ![]() зависит
от типа передачи.
зависит
от типа передачи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.