Вміст розрядів РП, які називаються прапорами, має таке призначення:
- прапор переносу Тс встановлюється в стан, відповідне переносу з старшого розряду при виконанні арифметичних операцій або операцій зсуву;
- прапор нульового результату ТZ встановлюється в стан лог. «1», якщо результат операції в АЛУ або в будь-якому РОН дорівнює нулю;
-- прапор знака TS встановлюється в стан лог. «1», якщо результат операції в АЛУ або будь-якому РОН негативний;
- прапор парності ТР встановлюється в стан лог. «1», якщо кількість одиниць в розрядах четно;
- прапор додаткового перенесення TV встановлюється в стан лог. «1», якщо при виконанні операцій АЛУ виникає перенесення з четвертого розряду.
РП підключений до внутрішньої магістралі МП, що дозволяє за допомогою спеціальних команд переслати його вміст в пам'ять системи. Це необхідно, наприклад, при виклику підпрограми, коли стан мікропроцесора необхідно запам'ятати в стеке.Управляющая частина мікропроцесора містить 8-розрядний регістр команд РК, дешифратор команд і управляючий пристрій. При виконанні команди програми, що міститься в пам'яті системи, код команди через буфер даних БД і внутрішню магістраль МП записується в РК для подальшої обробки в дешіфраторе команд і М. пристрої. Управляючий пристрій, робота якого тактіруется двома імпульснимі послідовності Ф1 і Ф2, виробляє три групи керуючих сигналів, необхідних для реалізації чотирьох режимів роботи МП: режиму початкової установки, очікування, прямого доступу до пам'яті та прериванія.Сігнали, що визначають стан шини даних:
С- Вихідний сигнал високого рівня, стробірует поява на ШД «слова стану»; ПМ - вихідний сигнал високого рівня, підтверджує готовність МП до прийому даних;
ВД - вихідний сигнал низького рівня, повідомляє, що МП видав інформацію на ШД.
Сигнали, що визначають робочий цикл мікропроцесора:
ГТ - вхідний сигнал високого рівня, сповістять про МП про готовність ВУ до обміну даними. При подачі на вхід ГТ сигналу низького рівня МП переходить в стан очікування, яке продовжується до моменту появи на вході ГТ сигналу високого рівня:
ОЖ - вихідний сигнал високого рівня, що підтверджує перехід МП в стан очікування;
ЗХ - вхідний сигнал високого рівня, що забезпечує відключення МП від ШД системи за рахунок перекладу буфер адреси БА і даних БД в високоімпедансное стан, що характеризується практично нескінченним вихідним опором;
ПЗХ - вихідний сигнал високого рівня, що підтверджує відключення МП від ШД;
СБР - вхідний сигнал низького рівня, що забезпечує початкову установку МП, при якій лічильник команд PC обнуляется, а сигнали ПЗХ і РПР здійснюється скид.
Вміст РОН при цьому змінюється.вихідним опором.
Сигнали управління прериваніямі:
ЗПР - вхідний сигнал високого рівня, який забороняє читання коду операції черговий команди виконуваної програми та готує мікропроцесор до виконання команд програми для обробки переривання;
РПР - вихідний сигнал високого рівня, що підтверджує переказ мікропроцесора в режим переривання.
МП тактіруется двома послідовності імпульсів Ф1 і Ф2, що виробляються ІС тактового генератора КР580ГФ24. Імпульсні послідовності мають амплітуду 12 В і не перекривається в часі. Крім того, генератор тактових імпульсів ГТВ формує позитивний імпульс стандартного ТТЛ-рівня і негативний імпульс «стрибає стану», який далі для стислості будемо позначати СТС. Формування всіх цих імпульсів відбувається з частотою повторення, що дорівнює дев'яти періодів коливань задающего кварцового резонатора, що підключається до висновків ГТВ. Отже, для отримання частоти прямування тактових імпульсів, що дорівнює 2 МГц, буде потрібно кварцовий резонатор з частотою, яка дорівнює 18 МГц. Одночасно ГТВ використовується для формування сигналів ГТ і СБР. Структурна схема ГТВ та його підключення до висновків МП показані на рис. 2.
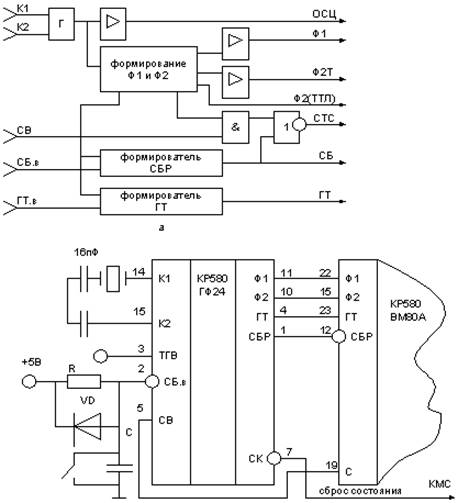 Рис. 2
Рис. 2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.