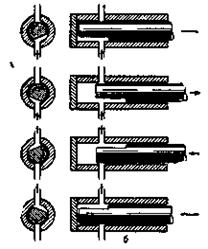
На рисунке 5.4 приведена схема бесклапанного дозатора с вращающимся поршнем для весьма малых расходов (от 0 до 1 мл/мин), дозируемых под давлением до 60 am при погрешности 0,2— 0,5%. Поршень 1 с лыской 2 на конце приводится во вращение электродвигателем 3 со скоростью 2 об!мин так, что при всасывании лыска
находится против впускного отверстия •1, а при нагнетании — против выходного отверстия 5. Возвратно-поступательное движение поршня при вращении двигателя вызывается взаимодействием пружины и упора, по которому скользит втулка со скосом 6. На рис. а, б показано различное положение поршня относительно входа и выхода.
|
|
|
|
Рисунок 5.4 Схема бесклапанного дозатора для малых расходов с вращающимся поршнем;
1 – поршень; 2 – лыска; 3 – электродвигатель; 4 – вход; 5 – выход; 6 – втулка с соском; 7 – упор; 8 – микрометрическое устройство.
На рис. 5.5 изображена оригинальная принципиальная схема дозатора с дифференциально изменяющимся объемом рабочей камеры.
Структурная схема дозатора соотношения показана на рис. 7: 1 — трубопровод основной жидкости; 2 — элемент, измеряющий переменный расход жидкости: 3 —сервомотор; 4 — дозатор; 5 — резервуар с дозируемой жидкостью; 6 — дополнительный элемент — реле, использующее посторонний источник энергии.
Дозатор является также неотъемлемой частью muтраторов автоматических, с помощью к-рых-автома-тнчески контролируется и регулируется качество.
|
|
Рисунок. 5.5 Схема дозатора с дифференциально изменяющимся объемом рабочей камеры: 1 и 2 – сильфоны;
3 – соединительная гайка; 4 – рабочая камера.
5.3 Выбор дозатора.
Подберем наиболее подходящий дозатор. Выбор дозатора для данной схемы должен происходить исходя из особенности их работы, а также требований, предъявляемых к устройству. Т.е. выбранный дозатор должен подходить для сыпучих материалов.
Нам подходит ленточный весовой дозатор представляющий собой конвейерные весы, в которых взвешивание осуществляется непрерывно и одновременно поддерживается установленное значение производительности (взвешенной массы в единицу времени) в диапазоне настройки с допустимой погрешностью. Основные операции, выполняемые в ленточных весовых дозаторах:
1) прием (материала в бункер)
2) транспортировка (материала по технологической линии)
3) взвешивание (непрерывно перемещающегося на весах потока материала)
4) дозирование ( путем обеспечения установленной производительности )
Рис. 5.6 Принцип действия
а, б – обеспечение постоянных материальных потоков (а – ленточный весовой дозатор; б – конвейерные весы, автоматически управляемые работой ленточного весового дозатора); в, г – непрерывное приготовление смесей (в -постоянные количества компонентов смеси подаются двумя или несколькими ленточными
весовыми дозаторами; г – различные количества компонентов смеси подаются ленточным весовым дозатором, управляемым конвейерными весами)
Рисунок 5.7 Управление путем изменения проходного сечения
течки А питателя.
1 — лента весов; 2 — весовое устройство с подвижной гирей; 3 — считывающее устройство; 4 — регулятор; 5 — электродвигатель, управляющий сегментной заслонкой; 6 — привод конвейер ленты (примечание; конструктивная простота, влияние кромки течки, инерционность, возможность возникновения раскачки системы, влияние свойств материала)
Рисунок. 5.8 Схема регулирования скорости ленты
/ — весовой ролик; 2—измерительный преобразователь; 3 — интегрирующий двигатель; 4—счетчик; 5 — задатчик; 6 — регулятор; 7 — усилитель; 8—привод транспортерной ленты; 9 — тахогенератор
При помощи этих основных операций ленточные весовые дозаторы могут обеспечивать:
1) постоянные материальные потоки:
— только при помощи ленточного весового дозатора
— при помощи комбинации с управляющими конвейерными весами
2) непрерывное приготовление смеси
— с постоянными компонентами (при помощи двух или нескольких ленточных весовых дозаторов)
— с различными компонентами (в комбинации с управляющими конвейерными весами или другими управляющими органами).
5.4 Расчет устройства
Произведем расчет типового устройства – гидропривода.
![]() Первым основным условием, обеспечивающим требуемый закон
движения нагрузки, является условие совместимости диаграммы нагрузки и
механической характеристики гидропривода. Это условие заключается в том, чтобы
диаграмма нагрузки всеми своими точками располагалась внутри области скоростей
и усилий, обусловленных механической нагрузкой-характеристикой:
Первым основным условием, обеспечивающим требуемый закон
движения нагрузки, является условие совместимости диаграммы нагрузки и
механической характеристики гидропривода. Это условие заключается в том, чтобы
диаграмма нагрузки всеми своими точками располагалась внутри области скоростей
и усилий, обусловленных механической нагрузкой-характеристикой:

т. е. располагаемые мощности и скорости движения привода, определяемые его механической характеристикой, должны быть больше или равны соответствующим при тех значениях сил требуемых мощностям, обусловленным диаграммой нагрузки.
Уравнениемеханической характеристики запишется в виде уравнения параболы:
при х= X m
Изменяя параметры An и Vрас , можно подобрать такую параболу механической характеристики, которая будет охватывать заданную диаграмму нагрузки этим самым обеспечит выполнение первого необходимого условия.
Вторым условием для получения оптимальных конструктивных параметров является условие работы гидропривода в оптимальном энергетическом режиме. Для выполнения этого условия из всех возможных вариантов необходимо выбрать такой привод, у которого максимальное значение мощности его механической характеристики совпадало бы по координате сил нагружения с максимальным значением мощности нагрузки. Это условие записывается формулой:
где Fn = Pпит * An – пусковое значение усилия на поршне
Fk – усилие нагружения, при котором мощность нагрузки имеет максимальное значение.
Исходные данные
Давление питания Pпит=1950 Н/см2
Масса нагрузки m=1000кг
Коэффициент позиционной нагрузки Cm=180000Н/м
Амплитуда гармонических колебаний A2=0,8см
Частота колебаний w=20 1/c
Постоянная нагрузка F0=100000Н
Ход поршня силового цилиндра Ymax=![]() 4 см
4 см
Коэффициент жесткости силовой проводки C=2*106 Н/м
Определяем:
- полуось эллипса нагрузки по оси сил
Fm=![]()
- координату силы нагружения, которая соответствует максимальному значению мощности нагрузки

- площадь поршня силового гидроцилиндра
Коэффициент жесткости гидравлической пружины силового гидроцилиндра
 где
V=1,2An*Ymax=38,4см2
где
V=1,2An*Ymax=38,4см2
Обобщенная жесткость гидромеханической системы привода
C1=
Уравнение эллипса нагрузки, которой графически представлена на рисунке
Значение скорости гидропривода, при котором сила нагружений F=Fн
Гидравлическая проводимость управляемого дросселя золотника
Площадь рабочего окна управляемого дросселя при -0,05см
Длинна прямоугольного рабочего окна при Xm=0,05см
Скорость гидропривода на холостом ходу
Уравнение механической характеристики гидропривода

Пусковое значение движущего усилия
Fпуск=An*Pпит=156000Н
|
|
Рисунок 5.9 расчетный график эллипса и оптимальной механической характеристики
Максимальное значение мощности гидропривода
На сновании полученной диаграммы нагрузки видно, что условие равенства мощностей и скоростей механической характеристики и требуемых мощностей и скоростей диаграммы нагрузки обеспечено.
Проверим второе условие: Fk=
10293=
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.