Глава I
Векторная алгебра
§1.1. Понятие вектора, и линейные операции над векторами.
Вектором называют отрезок, для которого указано какая из его граничных точек яв-ся началом, а какая концом. Длинну такого отрезка наз-ют величиной, модулем, длинной вектора. Вектор с началом в точке A и концом в точке B обозначают AB(с чертой сверху, далее просто AB), а его длину |AB| (или просто AB). Принято говорить, что такой вектор приложен к точке A. На рисунке конец обозначают стрелкой.
(рисунок)
Вектор наз-ся нулевым, если его начало и конец совпадают. Он не имеет направления, его длина равна 0, обозначается 0.
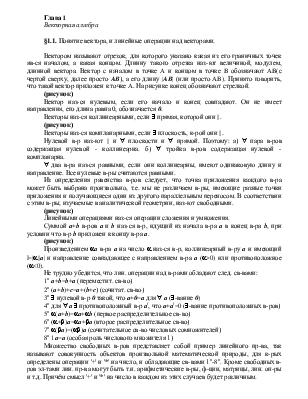
Векторы наз-ся коллинеарными, если $ прямая, которой они ||.
(рисунок)
Векторы наз-ся компланарными, если $ плоскость, к-рой они ||.
Нулевой в-р наз-ют || и " плоскости и " прямой. Поэтому: а) " пара в-ров содержащая нулевой - коллинеарна. б) " тройка в-ров содержащая нулевой - компланарна.
" два в-ра наз-ся равными, если они коллинеарны, имеют одинаковую длину и направление. Все нулевые в-ры считаются равными.
Из определения равенства в-ров следует, что точка приложения каждого в-ра может быть выбрана произвольно, т.е. мы не различаем в-ры, имеющие разные точки приложения и получающиеся один из другого параллельным переносом. В соответствии с этим в-ры, изучаемые в аналитической геометрии, наз-ют свободными.
(рисунок)
Линейными операциями наз-ся операции сложения и умножения.
Суммой a+b в-ров a и b наз-ся в-р, идущий из начала в-ра a в конец в-ра b, при условии что в-р b приложен к концу в-ра a.
(рисунок)
Произведением aa в-ра a на число a наз-ся в-р, коллинеарный в-ру a и имеющий l=|a||a| и направление совпадающее с направлением в-ра a (a>0) или противоположное (a<0).
Не трудно убедится, что лин. операции над в-рами обладают след. св-вами:
1° a+b=b+a (переместит. св-во)
2° (a+b)+c=a+(b+c) (сочитат. св-во)
3° $ нулевой в-р 0 такой, что a+0=a для " a ($-вание 0)
4° для " a $ противоположный в-р a/, что a+a/=0 ($-вание противоположных в-ров)
5° a(a+b)=aa+ab (первое распределительное св-во)
6° (a+b)a=aa+ba (второе распределительное св-во)
7° a(ba)=(ab)a (сочитательное св-во числовых сомножителей)
8° 1a=a (особая роль числового множителя 1)
Множество свободных в-ров представляет собой пример линейного пр-ва, так называют совокупность объектов произвольной математической природы, для к-рых определены операции '+' и '*' на число, и обладающие св-вами 1°-8°. Кроме свободных в-ров эл-тами лин. пр-ва могут быть т.н. арифметические в-ры, ф-ции, матрицы, лин. оп-ры и т.д. Причём смысл '+' и '*' на число в каждом из этих случаев будет различным.
Если в-ры a, b, c связаны рав-вом a=b+c (1а), то в-р c наз-ют разностью a и b и пишут c=a-b (1б)
Легко док-ть, что a-b=a+(-1)b (2)
Из (1а), (1б) и (2) получаем два способа построения разности заданных в-ров:
(рисунок)
Из этого параграфа вытекает, что в векторной алгебре вычисления подчиняются тем же правилам, что и в алгебре действительных чисел.
§1.2. Понятие линейной зависимости в-ров.
Линейной комбинацией (л/к) в-ров a1, a2, …, an (1) наз-ют выражение вида a1a1+a2a2+…+anan, где a1, a2, …, an - " числа - коэф-т линейной комбинации.
Векторы (1) наз-ют линейно зависимыми (л/з), если найдутся такие числа a1, a2, …, an, из к-рых хотя бы одно ¹0, что будет вып-ся рав-во: a1a1+a2a2+…+anan=0 (2)
Векторы (1) наз-ют л/нез, если (2) вып-ся лишь при условии, что a1=a2=…=an=0
Теорема 1:
Если хотябы один в-р из (1) яв-ся нулевым, то эти в-ры л/з.
Теорема 2:
Если часть в-ров (1) л/з, то и все эти в-ры л/з. Если (1) л/нез, то и " часть яв-ся л/нез.
Теорема 3:
Для того, чтобы в-ры (1) были л/з нид, чтобы один из этих в-ров яв-ся л/к остальных.
Док-во:
необходимость:
] в-ры (1) л/з, т.е. справедливо (2), в котор. хотя бы один ¹0. ] a1¹0, тогда поделив обе части на a1 и приняв b2º-a2/a1, b3º-a3/a1, …, bnº-an/a1, получим: a1=b2a2+b3a3+…+bnan (3), необходимость доказана.
достаточность:
] a1 яв-ся л/к остальных в-ров. Это означает, что найдутся такие числа b1, b2, …, bn, что будет справедливо рав-во (3). Но это рав-во можно представить в виде: (-1)a1+b2a2+b3a3+…+bnan=0. Т.к. среди чисел -1, b2, b3, …, bn хотя бы одно ¹0, то последнее рав-во доказывает л/зависимость. ч.т.д.
Важные св-ва систем из 2-х, 3-х и 4-х в-ров.
Теорема 4:
Для того чтобы a и b были л/з нид, чтобы они были коллинеарными.
Следствие: если a и b неколинеарные, то они л/нез (среди 2-х неколинеар. в-ров не может быть ни одного 0)
Теорема 5:
Для того чтобы a, b и c были л/з нид, чтобы они были компланарными.
Следствие: если a, b и c некомпланарные, то л/нез (среди 3-х некомпланар. в-ров не может быть ни одной пары колинеар. в-ров и не может быть ни одног 0)
Теорема 6:
" 4 в-ра л/нез.
§1.3. Понятие базиса. Аффинные системы координат.
Говорят, что два лежащих в векторной плоскости л/нез в-ра a и b образуют на этой плоскости базис, если " в-р c этой плоскости может быть представлен как л/к в-ров a и b, т.е. если найдутся такие числа l и m, что будет вып-ся рав-во c=la+mb (1).
Говорят, что 3 л/нез в-ра a, b и c образуют в пространстве базис, если" в-р d может быть представлен в виде нек-рой л/к в-ров a, b и c, т.е. если найдутся такие числа l, m и n,что будет вып-ся рав-во d=la+mb+nc (2).
Вопрос о построении базиса на плоскости.
Теорема 1:
" пара лежащих в данной плоскости неколинеар. в-ров a и b образуют на этой плоскости базис.
(рисунок)
Теорема 2:
" тройка некомпланарных в-ров a, b и c образуют в пр-ве базис.
В дальнейшем для определённости будем говорить о базисе в пр-ве.
Равенство (2) наз-ся разложение в-ра d по базисным в-рам a, b и c, числа l, m и n называют координатами или компонентами в-ра d.
d=la+mb+nc (3)
Понятие базиса.
Теорема 3:
Координаты каждого в-ра d относительно базиса a, b и c определяются однозначно.
Док-во: Допустим, что для в-ра d, кроме разложения (2) $ другое разложение по тому же базису: d=l'a+m'b+n'c (4). Вычитая почленно (4) из (3) получим: 0=(l-l')a+(m-m')b+(n-n')c. Т.к. в-ры a, b и c л/з, то это означает, что (l-l')=0, (m-m')=0 и (n-n')=0. ч.т.д.
Теорема 4:
При сложении 2-х в-ров их координаты относительно " базиса складываются. При умножении в-ра на " число все его коорд. умножаются на это число. Равные в-ры имеют равные коорд., а коорд. колинеарных в-ров ~.
Введём в пр-ве кроме базисных в-ров a, b и c ещё и некоторую фиксированную точку O, тем самым в пр-ве будет введена аффинная система координат. Точка O - начало координат, " d однозначно оп-ся своими коорд. l, m и n, а положение " точки M однозначно оп-ся коорд. её радиус вектора OM, если именно OM=aa+bb+gc, то числа a, b и g наз-ют координатами точки M и записывают так M(a, b, g).
(рисунок)
Координаты радиус вектора и самой точки это одно и то же.
] т.M1(a1, b1, g1) и т.M2(a2, b2, g2) яв-ся началом и концом M1M2.
M1M2=OM2-OM1 |
OM2=(a1, b1, g1) | =>, по Теореме 4, M1M2=(a1-a2, b1-b2, g1-g2) (5)
OM1=(a2, b2, g2) |
Нахождение координат в-ра с помощью координат его начала и конца.
Три в-ра наз-ся упорядоченной тройкой (или просто тройкой), если указано, какой из них яв-ся первым, вторым и третьим.
При записи мы всегда будем располагать в-ры в порядке их следования.
Упорядоченная тройка в-ров a, b и c наз-ся правой (левой), если после приведения их к общему началу в-р c располагается по ту сторону от плоскости, определяемой в-рами a и b, откуда кратчайший поворот от a к b кажется совершающимся против часовой стрелки (по часовой стрелке).
Аффинная система координат наз-ся правой (левой), если три её базисных в-ра образуют правую (левую) тройку.
Аффинная система на последнем рисунке с базисными в-рами a, b и cяв-ся правой, а сбазисными в-рами c, a и b - левой. В дальнейшем мы будем использовать только правые системы координат.
§1.4. Проэкция вектора на ось. Декартова система координат.
(рисунок)
Углом между a и b наз-ся угол < 180°. j=(a, b) (сверху уголок)
Прямую линию с указанным на ней направлением будем называть осью.
Углом j между a и осью x будем называть угол между двумя в-рами, один из к-рых совпадает с данным, а другой строется как показано на рисунке 2.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.