После раскрытия определителей формула (5.12) для системы 4-го порядка принимает вид:
 (5.13)
(5.13)
 (5.14)
(5.14)
Для системы 2-го порядка
 (5.15)
(5.15)
Для системы 1-го порядка
 (5.16)
(5.16)
ПРИМЕР 2 Передаточная функция системы имеет вид:
Определить оптимальное значение К1 по критерию минимум ИКК при подаче на вход U(t)=I(t). Параметры системы К1=20с1, Т = 0.1с2
РЕШЕНИЕ
1 Передаточная функция замкнутой системы

2 Изображение по Лапласу выходной величины

В соответствии с формулой (5.15) находим ИКК:

Для определения оптимального значения К2 соответствующего минимум ИКК, определим производную ИКК по К2 и приравняем ее нулю

5 Из этого значения определяем значение К2 при К1=20с1, Т = 0.1с2
![]()

Примечание - проверим
правильность полученного уравнения. Для этого определим значение ![]() при разных значениях К2.
при разных значениях К2.
|
При |
|
|
При |
|
|
При |
|
ОТВЕТ: Оптимальное значение К2
по критерию минимум ИКК равно ![]()
Анализ САУ по улучшенному интегральному критерию качества
Недостаток ИКК в том, что при приближении действительной переходном функции к идеальной увеличивается колебательность и перерегулирование, уменьшается запас устойчивости.
Поэтому широко применяется другая интегральная оценка, которая называется улучшенным интегральным квадратичным критерием (УИКК). Он вычисляется по формуле:
 (5.17)
(5.17)
УИКК так же характеризует "квадратичную площадь ошибки регулирования", по не относительно ступенчатом переходной функции, а определяется относительно экспоненциальной переходной функции с постоянной времени т (рисунок 5.2) и вычисляется УИКК по тем же формулам, как и ИКК.[5,7]
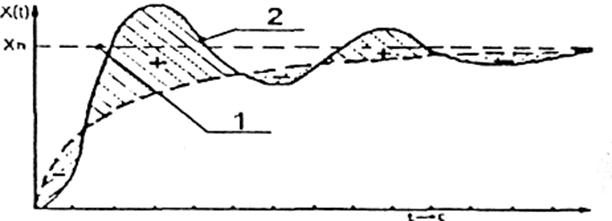
Рисунок 5.2 - Графики переходной функции
- идеальная переходная функция с ограничением по скорости возрастания
- реальная переходная функция;
заштрихованная область - отклонение реального переходного процесса от идеального.
Определить оптимальное значение К по критерию минимума УИКК мри подаче на вход U(t)=I(t). Параметры системы T = 0,5с, ограничение по скорости выходного сигнала равно т = 0,2с. РЕШЕНИЕ
1 Передаточная функция замкнутой системы:
Изображение по Лапласу выходной величины с учетом ограничения скорости т2

3 Как видно из полученного изображения регулируемой величины значения УИКК можно представить как сумму двух ИКК. Первый ИКК определяется по формуле (5.8) при b1= 0.

Второй ИКК определяется по формуле (5,15) при b1= 0:
Результирующее значение УИКК:
Для нахождения оптимального значения К определим производную УИКК по К и приравняем ее к 0.

из этого уравнения определяем значение К: по УИКК К=5с-1
Вычисление ИКК по ПФ ошибки регулирования
В некоторых случаях нахождение оптимального параметра по критерии минимума ИКК или минимума УИКК по изображению выходкой координаты по формуле (5.2) или (5.10) бывает достаточно сложным. Тогда ИКК или УИКК вычисляется по переходной составляющей ошибки регулирования.
Если дана передаточная функция замкнутой САУ, то изображение переходной составляющем ошибки регулирования определяется, но формуле:
 (5.18)
(5.18)
Если дана передаточная функция разомкнутой САУ, то изображение переходной составляющей ошибки регулирования определяется но формуле:
 (5.19)
(5.19)
Покажем определение ИКК по а(р) из конкретных примерах. [ 7 ]
ПРИМЕР 4 Передаточная функция замкнутой САУ имеет Вид
Определить оптимальное значение
коэффициента затухания ![]() по критерию минимума ИКК при входном
сигнала U(t) =I (t).
по критерию минимума ИКК при входном
сигнала U(t) =I (t).
РЕШЕНИЕ I Определяем ИKK но изображению регулируемой величины х(р)
1 Изображение регулируемой величины при входном сигнале U(t) =I (t).
2 В соответствии с формулой (5.8) находим ИКК

3 Определим производную ИКК по ![]() и приравниваем ее к 0
и приравниваем ее к 0

Из этого определяем значение ![]()
![]() =0
=0 ![]()
ОТВЕТ: Оптимальное значение ![]() =0,5
=0,5
РЕШЕНИЕ 2 Определяем ИКК по переходной составляющей ошибки регулирования а(р)
1 Как видно из решения 1 значение
коэффициента усиления К на нахождение оптимального значение ![]() влияния не оказывает. Поэтому для
упрощения расчета принимаем К = 1.
влияния не оказывает. Поэтому для
упрощения расчета принимаем К = 1.

3 В соответствии с формулой (5.15) находим ИКК:

4 Определяем производную ИКК по ![]() и приравнивая ее к 0
и приравнивая ее к 0

Из этого уравнения определяем ![]()
![]() =0
=0 ![]()
ОТВЕТ: Оптимальное значение![]() по ИКК, полученное двумя
способами, полностью совпадает и равно
по ИКК, полученное двумя
способами, полностью совпадает и равно ![]() =0,5
=0,5
ПРИМЕР 5 Передаточная функция разомкнутой системы имеет вид
Определить оптимальное значение Т1 по критерию минимума ИКК при подачи на вход U(t) =I (t). Определение оптимального значение Т1, провести двумя способами.
РЕШЕНИЕ а) по изображению регулируемой величины х(р)
Передаточная функция замкнутой системы:
2 Изображение регулируемой величины
3 Значение ИКК по формуле (5.8)
4 Очевидно что ![]() при
при ![]()
РЕШЕНИЕ: 6) по изображению составляющей ошибки регулирования а(р)
I Изображение переходной составляющей ошибки регулирования по формуле (5.18)

2 Значение ИКК по формуле (5.15)
3 Очевидно что ![]() при
при ![]()
ОТВЕТ: Оптимальное знамение Т1 полученное через х(р) и а(р) , полностью совпадает и равно Т1 —> 0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
