

















Основные требования к частотно-регулируемому электроприводу такие же, как и к любому регулируемому приводу – обеспечение значений координат движения – скорости ω и момента М, при которых бы в различных производственных механизмах обеспечивалось оптимальное протекание технологических процессов. Связь между ними в установившемся процессе определяется механическими характеристиками ω = f (М) электропривода и механизма. При этом требуемыми, т.е. служащими заданием для электропривода, являются значения скорости ω и момента М, соответствующие механическим характеристикам механизма. Задача системы управления электроприводом состоит в обеспечении этих значений во всех режимах работы, предусмотренных технологическим процессом.
Как известно, угловая частота напряжения питания равна ω0эл = 2πf1, а частота вращения магнитного поля статора асинхронных двигателей в пространстве и синхронная скорость вращения ротора зависят еще и от числа пар полюсов рп: ω0 = ω0эл/рп = 2πf1/ рп, где f1 - частота питающего напряжения. Таким образом, при определенном рп задача регулирования скорости вращения ротора двигателя переменного тока ω сводится к регулированию частоты f1. Основной же проблемой, которую приходится решать при частотном регулировании, является получение требуемых значений моментов двигателя.
 Поэтому о природе
создания моментов двигателя следует поговорить отдельно. Согласно теории
электрических машин, у всех электрических двигателей преобразование энергии, результатом
которого является создание электромагнитного момента, осуществляется по единым
законам.
Поэтому о природе
создания моментов двигателя следует поговорить отдельно. Согласно теории
электрических машин, у всех электрических двигателей преобразование энергии, результатом
которого является создание электромагнитного момента, осуществляется по единым
законам.
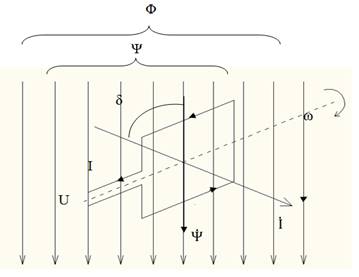
На рисунке 1.1 приведена элементарная модель
двигателя вращательного движения. Если в магнитное поле Ф, созданное обмоткой,
расположенной на статоре, поместить рамку с током I,
представляющую собой часть обмотки ротора, то часть магнитного потока будет
пронизывать рамку. Ток в рамке создает поток ротора, ортогональный к плоскости
рамки и пропорциональный ему по величине. В результате взаимодействия полей
статора и ротора возникают электромагнитные усилие и момент, приложенные к
рамке. Не весь поток Ф, создаваемый обмоткой статора, участвует Рис.
1.1. Элементарная модель двигателя в создании момента, а только та его часть, которая w2 проводников обмотки ротора
и электродвигателя характеризуется величиной
потокосцепления Ψ = Ф·w2. Оставшаяся часть называется
потоком рассеяния и оценивается индуктивностью рассеяния Lσ . Электромагнитный
момент определяется величинами потокосцепления Ψ и тока ротора I, а также углом δ между их векторами. Эту зависимость можно
представить векторным произведением вектора потокосцепления ![]() и вектора тока I,
ориентированного вдоль оси, перпендикуляр-ной к плоскости рамки:
и вектора тока I,
ориентированного вдоль оси, перпендикуляр-ной к плоскости рамки:
М = |![]() |
× |
|
× |![]() |, или в скалярной
форме: М = Ψ ·I · sinδ, где Ψ и I – амплитуды потокосцепления статора и тока
ротора.
|, или в скалярной
форме: М = Ψ ·I · sinδ, где Ψ и I – амплитуды потокосцепления статора и тока
ротора.
В двигателях постоянного тока ток в рамке I протекает за счет приложенного к якорю напряжения (как это показано на рисунке) и создает пропорциональный ему по величине поток ротора (якоря), направление которого совпадает с вектором тока, ортогональным к плоскости рамки. Причем магнитный поток и потокосцепление постоянны, а угол δ = 90˚, что достигается фиксированным расположением щеточного аппарата, т.е. конструктивно. Таким образом, момент пропорционален току обмотки якоря при наибольшем значении sinδ = 1, т.е. зависит только от одной переменной – тока якоря.
В синхронных двигателях с постоянными магнитами на роторе поток ротора создается этими магнитами и его потокосцепление постоянно по величине, а положение вектора потока в пространстве однозначно определяется положением ротора. Ток в обмотке статора, создающий поток статора, протекает за счет напряжения питания. При идеальном холостом ходе (М = 0) потоки обмоток статора и ротора в пространстве совпадают (δ = 0˚). При увеличении нагрузки ротор и вектор его потока отстают в пространстве от вектора потокосцепления статора на угол δ, а создаваемый ими момент возрастает, достигая максимального значения при δ = 90˚, что является предельным для синхронного двигателя. Следовательно, в синхронных двигателях момент пропорциона-лен произведению тока статора I на sinδ, т.е. зависит от двух переменных: I и δ.
В вентильных двигателях, являющихся их разновидностью, система управления строится таким образом, что определенным фазированием напряжения питания обмоток статора в зависимости от положения ротора постоянно обеспечивается угол δ = 90˚. Таким образом, в вентильном двигателе момент пропорционален току обмотки статора т.е. зависит только от одной переменной – тока обмотки статора при наибольшем значении sinδ = 1. Таким образом, вентильный двигатель по регулировочным свойствам эквивалентен двигателю постоянного тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.