Особый
интерес представляет характер изменения тока при малых нагрузках (рис.1.7,б).
Он обусловлен тем, что используемые при U/f – управлении компенсирующие связи работают в функции тока
статора, и от характера его поведения при малых нагрузках зависит момент
вступления их в действие. Как видно из графика, при увеличении нагрузки ток
сначала уменьшается и начинает возрастать только при определенных значениях
нагрузки Эти значения тем больше, чем меньше частота f1.
Такой характер изменения тока объясняется перераспределением падений напряжения
при неизменном напряжении питания между активным и реактивным сопртивлениями
обмотки статора. При отсутствии нагрузки приложенное напряжение почти полностью
падает на реактивном сопротивлении. При увеличении нагрузки возрастает падение
напряжения на активном сопротивлении, в результате чего полный ток ![]() уменьшается и достигает своего
наименьшего значения при равенстве падений напряжения на активном и реактивном
сопротивлениях. Чем меньше частота и напряжение, тем при бóльших нагрузках
достигается это равенство и начинается рост тока
уменьшается и достигает своего
наименьшего значения при равенстве падений напряжения на активном и реактивном
сопротивлениях. Чем меньше частота и напряжение, тем при бóльших нагрузках
достигается это равенство и начинается рост тока ![]() .
Данный факт полностью согласуется с бóльшим снижением потокосцепления
.
Данный факт полностью согласуется с бóльшим снижением потокосцепления ![]() на низких частотах (рис.1.6).
на низких частотах (рис.1.6).
1.3.3. Ток обмотки ротора
Ток обмотки
ротора, определяемый потокосцеплением![]() , участвует в
создании момента двигателя, что объясняет необходимость его анализа при
различных режимах и условиях работы. Ток ротора
, участвует в
создании момента двигателя, что объясняет необходимость его анализа при
различных режимах и условиях работы. Ток ротора ![]() создается
за счет ЭДС Е2,
наводимой в роторе потокосцеплением
создается
за счет ЭДС Е2,
наводимой в роторе потокосцеплением ![]() :
:
Е2 =![]()
![]() =
= ![]()
![]() s;
s; ![]() , (1.28)
, (1.28)
 На
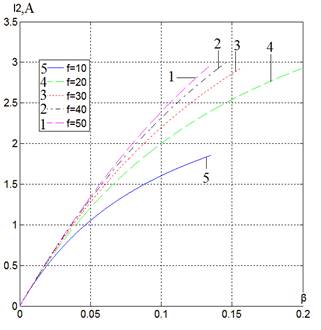
рис.1.7 изображены кривые тока ротора
На
рис.1.7 изображены кривые тока ротора ![]() ,
рассчитанные при частотах f1 = 10 ÷ 50 Гц по
(1.28). Характер их изменения определяется двумя факторами: соотношением
,
рассчитанные при частотах f1 = 10 ÷ 50 Гц по
(1.28). Характер их изменения определяется двумя факторами: соотношением ![]() и
и ![]() и
изменением потокосцепления
и
изменением потокосцепления ![]() . Влияние
индуктивного сопротивления
. Влияние
индуктивного сопротивления ![]() проявляется
кроме того в экспоненциальном характере изменения тока и наличии критической
точки (не показанной на графике). Зависимость потокосцепления от частоты и
нагрузки отражается на величине тока. При малых нагрузках и, соответственно,
низких частотах
проявляется
кроме того в экспоненциальном характере изменения тока и наличии критической
точки (не показанной на графике). Зависимость потокосцепления от частоты и
нагрузки отражается на величине тока. При малых нагрузках и, соответственно,
низких частотах ![]() =
=![]() s,
когда можно пренебречь индуктивным сопротивлением
s,
когда можно пренебречь индуктивным сопротивлением ![]() , ток ротора определяется величиной Е2 и активным сопротивлением
, ток ротора определяется величиной Е2 и активным сопротивлением ![]() ,
изменяясь линейно при увеличении нагрузки и скольжения. Однако по мере
увеличения нагрузки и
,
изменяясь линейно при увеличении нагрузки и скольжения. Однако по мере
увеличения нагрузки и ![]() заметно воз-растают
индуктивное сопротивление и его влияние на
заметно воз-растают
индуктивное сопротивление и его влияние на ![]() .
Темп роста тока замедляется и, кроме того, начинается его отставание от Е2, характеризуемое углом
.
Темп роста тока замедляется и, кроме того, начинается его отставание от Е2, характеризуемое углом ![]() (1.20):
(1.20): ![]() . Отставание синусоиды тока от
синусоиды
. Отставание синусоиды тока от
синусоиды![]() означает уменьшение величины тока,
фактически участвующего в создании момента, который обозначается как активная
составляющая тока ротора
означает уменьшение величины тока,
фактически участвующего в создании момента, который обозначается как активная
составляющая тока ротора ![]() . При критических
значениях частоты Рис.1.8. Кривые тока ротора при ротора
. При критических
значениях частоты Рис.1.8. Кривые тока ротора при ротора ![]() и скольжения sК
ток
и скольжения sК
ток![]() достигает
макси- частотах f1 =10÷50
Гц.
достигает
макси- частотах f1 =10÷50
Гц.
мального значения. При
дальнейшем увеличении нагрузки происходит «опрокидывание двигателя». Величина sК находится из равенства активного и индуктивного
сопротивлений: ![]() , из которого также
следует, что sК при уменьшении частоты питания
, из которого также
следует, что sК при уменьшении частоты питания ![]() растет.
растет.
Таким
образом, нелинейность механической характеристики двигателя и наличие на ней
критической точки, ограничивающей ее рабочий участок, обусловлены исключительно
влиянием индуктивного сопротивления обмотки ротора ![]() .
.
Для расчета и построения механических характеристик используются значения электромагнитного момента двигателя и скорости, рассчитываемых по формулам:
![]()
![]() (1.29)
(1.29)
 На
рис.1.9. представлены механические характеристики, рассчитанные по этим
форму-лам для тех же частот f1 = 10÷50 Гц в
границах заданного предельного значения тока статора
На
рис.1.9. представлены механические характеристики, рассчитанные по этим
форму-лам для тех же частот f1 = 10÷50 Гц в
границах заданного предельного значения тока статора ![]() .
На частотах 10 и 20 Гц момент достигает критического значения в этих пределах,
при бóльших частотах он достигает-
.
На частотах 10 и 20 Гц момент достигает критического значения в этих пределах,
при бóльших частотах он достигает-
ся при бóльших токах. Критический
момент при уменьшении частоты снижается и уже при частоте 10 Гц он даже меньше
номинального. Уменьшение момента обусловлено снижением ![]() при
уменьшении частоты.
при
уменьшении частоты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.