Исследование
рассмотренных особенностей Рис.1.13. Кривые тока статора при работы IR–компенсации представлет интерес пото- различных
значениях коэффициента ![]()
му, что в технической и учебной литературе они не рассматриваются.
В преобразователях частоты предусмотрена функция автоматической установки IR–компенсации. При ее активизации в момент включения
двигателя автоматически выполняется измерение сопротивления обмотки статора,
вычисление ![]() и задание
и задание ![]() . Эта функция удобна не только тем,
что упрощает задачу настройки привода и задает оптимальное значение
компенсации, но и тем, что выполняет эту операцию при каждом включении двигателя,
учитывая тем самым нагрев и изменение сопротивлений обмоток.
. Эта функция удобна не только тем,
что упрощает задачу настройки привода и задает оптимальное значение
компенсации, но и тем, что выполняет эту операцию при каждом включении двигателя,
учитывая тем самым нагрев и изменение сопротивлений обмоток.
IR–компенсация позволяет достичь требуемых значений моментов,
но наклон механических характеристик будет не меньше (а скорее больше), чем на
естественной характеристике. При регулировании скорости в сторону уменьшения (![]()
![]() 1)
при
1)
при![]() = const
абсолютное скольжение
= const
абсолютное скольжение ![]() остается постоянным, а
относительное скольжение s,
а с ним и относительная ошибка по скорости возрастают. Если по техническим
требованиям к приводу это не допустимо, то для увеличения жесткости
механических характеристик используется предназначенная для этого «компенсация
скольжения». Компенсация скольжения – это также положительная обратная связь по
току обмотки статора, но действующая по каналу частоты. При увеличении нагрузки
и тока
остается постоянным, а
относительное скольжение s,
а с ним и относительная ошибка по скорости возрастают. Если по техническим
требованиям к приводу это не допустимо, то для увеличения жесткости
механических характеристик используется предназначенная для этого «компенсация
скольжения». Компенсация скольжения – это также положительная обратная связь по
току обмотки статора, но действующая по каналу частоты. При увеличении нагрузки
и тока ![]() , благодаря этой связи, к
заданному значению частоты f10 добавляется значение, определяемое
коэффициентом обратной связи kf , так что частота выходного напряжения равна:
, благодаря этой связи, к
заданному значению частоты f10 добавляется значение, определяемое
коэффициентом обратной связи kf , так что частота выходного напряжения равна:
f1 = f10 + kf![]() .
.
Благодаря этому, с ростом
нагрузки возрастает ![]() и скорость двигателя,
компенсируя тем самым ее снижение, обусловленное наклоном механической
характеристики. В отличие от IR–компенсации
эта компенсация начинает действовать с тока
и скорость двигателя,
компенсируя тем самым ее снижение, обусловленное наклоном механической
характеристики. В отличие от IR–компенсации
эта компенсация начинает действовать с тока ![]() .
Величина kf ,
как и в предыдущем случае, устанавливается при настройке в зависимости от
требуемой жесткости. Компенсация скольжения используется не всегда, а лишь при
необходимости.
.
Величина kf ,
как и в предыдущем случае, устанавливается при настройке в зависимости от
требуемой жесткости. Компенсация скольжения используется не всегда, а лишь при
необходимости.
Предельное
значение ![]() ограничено, как и раньше условиями
устойчивости. Обычно рекомендуется устанавливать значение
ограничено, как и раньше условиями
устойчивости. Обычно рекомендуется устанавливать значение ![]() , соответствующие номинальной
частоте скольжения. Для исследуемого двигателя она равна 120 об/мин, поэтому
расчеты проводились для частот скольжения: 90; 120; 150 об/мин,
задаваемые в параметре Р324 преобразователя частоты.
, соответствующие номинальной
частоте скольжения. Для исследуемого двигателя она равна 120 об/мин, поэтому
расчеты проводились для частот скольжения: 90; 120; 150 об/мин,
задаваемые в параметре Р324 преобразователя частоты.
 В качестве примера на рис.1.14 представлены механические
характеристики того же двигате-ля, рассчитанные для скоростей: 900; 600; 300
об/мин и трех значений
В качестве примера на рис.1.14 представлены механические
характеристики того же двигате-ля, рассчитанные для скоростей: 900; 600; 300
об/мин и трех значений ![]() (параметр Р324). Там же
приведена характеристика привода без ком-пенсации скольжения. Их сравнение
показывает, что жесткость характеристик увеличивается пропорционально
коэффициенту
(параметр Р324). Там же
приведена характеристика привода без ком-пенсации скольжения. Их сравнение
показывает, что жесткость характеристик увеличивается пропорционально
коэффициенту ![]() , но харак-тер кривых практически
такой же, как и без компенсаций. При компенсации скольжения вместе с частотой
при росте
, но харак-тер кривых практически
такой же, как и без компенсаций. При компенсации скольжения вместе с частотой
при росте![]() , в соответствии с базовой
характеристикой, пропорционально увеличивается и напряжение,
практически Рис.1.14. Механические характеристики не влияя однако
на величину момента. при различных степенях компенсации
, в соответствии с базовой
характеристикой, пропорционально увеличивается и напряжение,
практически Рис.1.14. Механические характеристики не влияя однако
на величину момента. при различных степенях компенсации
Изложенный ранее материал показывает, что использование только одной компенсации позволяет улучшить один из показателей – момент или жесткость. Поэтому, если при формировании механических характеристик требуется улучшение обоих показателей, то необходимо использование обеих компенсаций. Однако возникает вопрос, оказывают ли влияние компенсации друг на друга или их работа проходит без взаимного влияния.
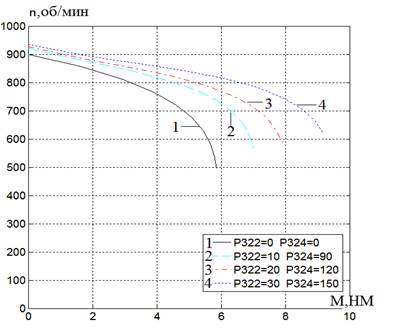 На рис.1.14,а
представлены механические характеристики для трех скоростей и одинаковых
степеней компенсаций: Р322 = 20 (недокомпенсация) и Р324 = 120 (частота
номинального скольжения). На рис.1.14,б представлены механические
характеристики при скорости 900 об/мин и различных сочетаниях значений степеней
компенсаций. На обоих рисунках для сравнения приведены характеристики привода
без компенсаций. Как и на всех предыдущих рисунках, крайние точки кривых
соответствуют заданному предельному току статора
На рис.1.14,а
представлены механические характеристики для трех скоростей и одинаковых
степеней компенсаций: Р322 = 20 (недокомпенсация) и Р324 = 120 (частота
номинального скольжения). На рис.1.14,б представлены механические
характеристики при скорости 900 об/мин и различных сочетаниях значений степеней
компенсаций. На обоих рисунках для сравнения приведены характеристики привода
без компенсаций. Как и на всех предыдущих рисунках, крайние точки кривых
соответствуют заданному предельному току статора ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.