


Прямое управление моментом АД
Прямое управление моментом АД представляет собой развитие векторного подхода к созданию систем управления двигателями переменного тока. Задачей прямого управления является получение быстрой реакции момента на управляющее воздействие.
Данный метод управления базируется на анализе общей для всех электромеханических преобразователей зависимости вращательного движения (1).
![]() ,
(1)
,
(1)
где
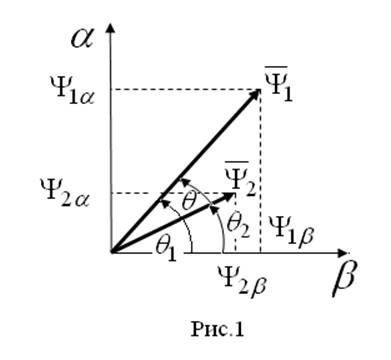
С- коэффициент, зависящий от типа преобразователя, ![]() - угол
между векторами потокосцеплений статора и ротора,
- угол
между векторами потокосцеплений статора и ротора, ![]() .
.
 Выражение (1) было записано для
вращающейся системы координат
Выражение (1) было записано для
вращающейся системы координат
Х-У,
но поскольку значение момента не зависит от системы координат, в таком же виде
оно может быть записано и в неподвижной системе координат ![]() .
.
Как следует из (1) изменять электромагнитный момент
можно либо за счет изменения модулей потокосцеплений, либо за счет изменения
угла ![]() . В
системе прямого управления моментом используется именно второй способ, т.к.
изменить положение вектора потокосцепления статора
. В
системе прямого управления моментом используется именно второй способ, т.к.
изменить положение вектора потокосцепления статора ![]() можно
практически мгновенно за счет оптимального переключения ключей инвертора, питающего
обмотки АД. Для изменения модулей векторов потокосцеплений статора и ротора
требуется управлять токами обмоток статора и ротора, что связано с преодолением
инерционностей, вызванных наличием индуктивностей этих обмоток.
можно
практически мгновенно за счет оптимального переключения ключей инвертора, питающего
обмотки АД. Для изменения модулей векторов потокосцеплений статора и ротора
требуется управлять токами обмоток статора и ротора, что связано с преодолением
инерционностей, вызванных наличием индуктивностей этих обмоток.
Постоянная времени обмоток ротора асинхронного
двигателя достаточно велика, поэтому на каждом шаге расчета можно считать, что
модуль потокосцепления ![]() остается
неизменным. Если, воздействуя на вектор напряжения на статоре
остается
неизменным. Если, воздействуя на вектор напряжения на статоре ![]() ,
поддерживать постоянство модуля потокосцепления
,
поддерживать постоянство модуля потокосцепления ![]() , то
электромагнитный момент двигателя можно изменить так быстро, как быстро можно
изменить угол
, то
электромагнитный момент двигателя можно изменить так быстро, как быстро можно
изменить угол ![]() .
Изменение этого угла может быть достигнуто воздействием на вектор напряжения на
статоре
.
Изменение этого угла может быть достигнуто воздействием на вектор напряжения на
статоре ![]() .
.
Как напряжение на статоре влияет на вектор потокосцепления можно проанализировать на основе уравнения ЭДС обмоток статора
 .
(2)
.
(2)
Если пренебречь активным сопротивлением статора, то (2) принимает вид:
![]() .
.
В этом случае проекции
вектора напряжения статора на оси неподвижных координат ![]() ,
, ![]() и
и ![]() , будут
определять скорость изменения проекций вектора потокосцепления статора в
зависимости от приложенного напряжения. Если перейти от производных к малым приращениям
переменных, то получится
, будут
определять скорость изменения проекций вектора потокосцепления статора в
зависимости от приложенного напряжения. Если перейти от производных к малым приращениям
переменных, то получится ![]() а проекции
на оси
а проекции
на оси ![]() будут
равны
будут
равны![]() и
и ![]() .
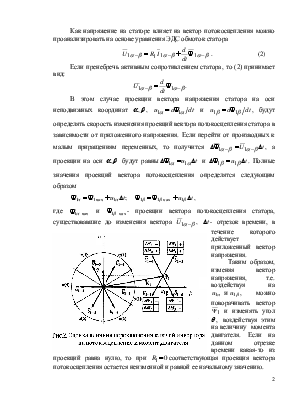
Полные значения проекций вектора потокосцепления определятся следующим образом
.
Полные значения проекций вектора потокосцепления определятся следующим образом
![]()
![]() ,
,
 где
где ![]() и
и ![]() -
проекции вектора потокосцепления статора, существовавшие до изменения вектора
-
проекции вектора потокосцепления статора, существовавшие до изменения вектора ![]() ,
, ![]() -
отрезок времени, в течение которого действует приложенный вектор напряжения.
-
отрезок времени, в течение которого действует приложенный вектор напряжения.
Таким образом, изменяя вектор напряжения, т.е. воздействуя
на ![]() , можно
поворачивать вектор
, можно
поворачивать вектор ![]() и
изменять угол
и
изменять угол ![]() ,
воздействуя этим на величину момента двигателя. Если на данном отрезке времени
какая-то из проекций равна нулю, то при
,
воздействуя этим на величину момента двигателя. Если на данном отрезке времени
какая-то из проекций равна нулю, то при ![]() соответствующая
проекция вектора потокосцепления остается неизменной и равной ее начальному
значению.
соответствующая
проекция вектора потокосцепления остается неизменной и равной ее начальному
значению.
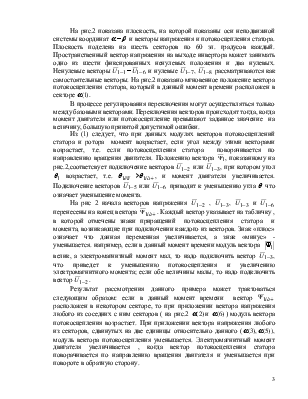
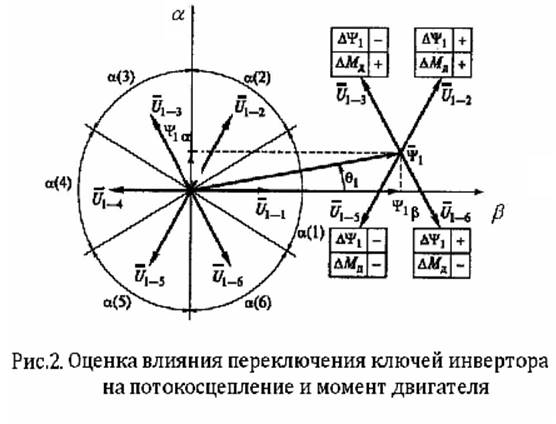
На рис.2 показана плоскость, на которой показаны оси
неподвижной системы координат ![]() и
векторы напряжения и потокосцепления статора. Плоскость поделена на шесть
секторов по 60 эл. градусов каждый. Пространственный вектор напряжения на
выходе инвертора может занимать одно из шести фиксированных ненулевых положения
и два нулевых. Ненулевые векторы
и
векторы напряжения и потокосцепления статора. Плоскость поделена на шесть
секторов по 60 эл. градусов каждый. Пространственный вектор напряжения на
выходе инвертора может занимать одно из шести фиксированных ненулевых положения
и два нулевых. Ненулевые векторы ![]() и
нулевые
и
нулевые ![]() рассматриваются
как самостоятельные векторы. На рис.2 показано мгновенное положение вектора
потокосцепления статора, который в данный момент времени расположен в секторе
рассматриваются
как самостоятельные векторы. На рис.2 показано мгновенное положение вектора
потокосцепления статора, который в данный момент времени расположен в секторе ![]() .
.
В процессе регулирования переключения могут осуществляться только между базовыми векторами. Переключения векторов происходят тогда, когда момент двигателя или потокосцепление превышают заданное значение на величину, большую принятой допустимой ошибки.
Из (1) следует, что при данных модулях векторов
потокосцеплений статора и ротора момент возрастает, если угол между этими
векторами возрастает, т.е. если потокосцепления статора поворачивается по
направлению вращения двигателя. Положению вектора ![]() ,
показанному на рис.2,соответсвует подключение векторов
,
показанному на рис.2,соответсвует подключение векторов ![]() или
или ![]() , при
котором угол
, при
котором угол ![]() возрастает
возрастает
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.