Лекция 15
К этому типу преобразователей можно отнести синхронные машины с постоянными магнитами или обмоткой возбуждения на роторе; шаговые двигатели различных типов; вентильные двигатели (другие названия этих машин: управляемые синхронные двигатели, бесколлекторные машины постоянного тока).
 Часто под
синхронными машинами понимают только первую группу машин, у которых ротор с
обмоткой возбуждения или постоянными магнитами вращается в поле обмоток
статора, а обмотки статора создают круговое поле, вращающееся с частотой
Часто под
синхронными машинами понимают только первую группу машин, у которых ротор с
обмоткой возбуждения или постоянными магнитами вращается в поле обмоток
статора, а обмотки статора создают круговое поле, вращающееся с частотой ![]() частота
питающей сети. Поэтому и мы начнем рассматривать принцип действия синхронных
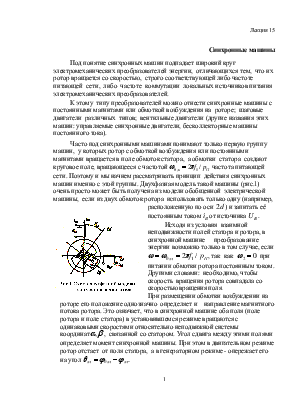
машин именно с этой группы. Двухфазная модель такой машины (рис.1) очень просто
может быть получена из модели обобщенной электрической машины, если из двух
обмоток ротора использовать только одну (например, расположенную по оси
частота
питающей сети. Поэтому и мы начнем рассматривать принцип действия синхронных
машин именно с этой группы. Двухфазная модель такой машины (рис.1) очень просто
может быть получена из модели обобщенной электрической машины, если из двух
обмоток ротора использовать только одну (например, расположенную по оси ![]() ) и запитать
её постоянным током
) и запитать
её постоянным током ![]() от
источника
от
источника ![]() .
.
Исходя из условия взаимной неподвижности
полей статора и ротора, в синхронной машине преобразование энергии возможно
только в том случае, если ![]() ,
так как
,
так как ![]() при питании
обмотки ротора постоянным током. Другими словами: необходимо, чтобы скорость
вращения ротора совпадала со скоростью вращения поля.
при питании
обмотки ротора постоянным током. Другими словами: необходимо, чтобы скорость
вращения ротора совпадала со скоростью вращения поля.
При
размещении обмотки возбуждении на роторе его положение однозначно определяет
и направление магнитного потока ротора. Это означает, что в синхронной
машине оба поля (поле ротора и поле статора) в установившемся режиме вращаются
с одинаковыми скоростями относительно неподвижной системы координат![]() , связанной
со статором. Угол сдвига между этими полями определяет момент синхронной
машины. При этом в двигательном режиме ротор отстает от поля статора, а в
генераторном режиме - опережает его на угол
, связанной
со статором. Угол сдвига между этими полями определяет момент синхронной
машины. При этом в двигательном режиме ротор отстает от поля статора, а в
генераторном режиме - опережает его на угол ![]()
Интересно отметить, что если в осях ![]() все
переменные, характеризующие работу машины, синусоидальные величины, то в осях
d, q, связанных с ротором, они становятся постоянными, зависящими только от
угла
все
переменные, характеризующие работу машины, синусоидальные величины, то в осях
d, q, связанных с ротором, они становятся постоянными, зависящими только от
угла ![]()
Напряжения ![]() и
и
![]() в осях d и q
могут быть записаны в виде
в осях d и q
могут быть записаны в виде
Уравнения динамической механической характеристики синхронного двигателя в осях d и q принимают вид
 (1)
(1)
Поскольку
для явнополюсного ротора ![]() и
и
![]() , потокосцепления
могут быть представлены уравнениями
, потокосцепления
могут быть представлены уравнениями
Уравнения (1) нелинейные и сложны для аналитического решения. Приближенное их решение может быть получено с помощью угловой статической характеристики двигателя при условиях:
![]() ;
; ![]() .
.
Система уравнений (1) принимает вид

Из (2) находим
При подстановке выражений для токов в формулу для момента получим
 .
.
Для трехфазного явнополюсного двигателя уравнение угловой характеристики имеет вид
 . (3)
. (3)
Подробно преобразование координат в многофазных синхронных машинах описано в [4].
Момент синхронного двигателя (2)
содержит две составляющих, одна из которых создается взаимодействием
вращающегося поля статора с полем ротора, а вторая представляет собой
реактивный момент, обусловленный явнополюсным исполнением ротора. Вследствие
явнополюсности ротора 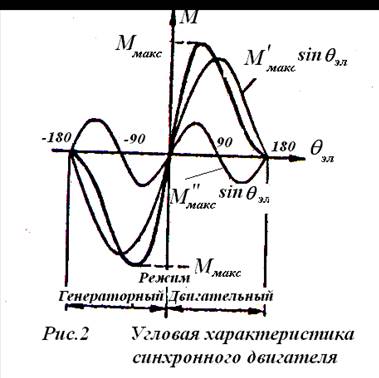 энергия магнитного
поля максимальна при любом из двух возможных положений ротора,
соосных с полем статора, что и определяет зависимость реактивного момента
от двойного угла
энергия магнитного
поля максимальна при любом из двух возможных положений ротора,
соосных с полем статора, что и определяет зависимость реактивного момента
от двойного угла ![]() .
.
На рис.2 показан вид угловой характеристики синхронного двигателя.
Выражение для момента (2), содержащее две принципиально различные составляющие, дает возможность конструировать электрические машины с преобладанием одной из них в результирующем моменте.
Так, в синхронных
машинах с неявнополюсным ротором, у которых ![]() , реактивная
составляющая момента отсутствует, а у синхронных реактивных двигателей
явнополюсный ротор вообще не возбуждается, и в уравнении момента отсутствует
первая составляющая. Особенно много типов и конструкций синхронных машин среди
микромашин (к микромашинам относят электрические машины мощностью менее 500
Ватт). Особую группу синхронных машин составляют шаговые двигатели, отличие
которых от классических синхронных машин состоит в дискретном (импульсном) питании
обмоток статора от специальных коммутаторов. Такой способ возбуждения приводит
к неравномерному вращению (шаганию) поля статора в осях
, реактивная
составляющая момента отсутствует, а у синхронных реактивных двигателей
явнополюсный ротор вообще не возбуждается, и в уравнении момента отсутствует
первая составляющая. Особенно много типов и конструкций синхронных машин среди
микромашин (к микромашинам относят электрические машины мощностью менее 500
Ватт). Особую группу синхронных машин составляют шаговые двигатели, отличие
которых от классических синхронных машин состоит в дискретном (импульсном) питании
обмоток статора от специальных коммутаторов. Такой способ возбуждения приводит
к неравномерному вращению (шаганию) поля статора в осях ![]() . Основные
типы шаговых двигателей - с активным ротором, реактивные и индукторные имеют
либо обе, либо одну из двух составляющих момента (2). В последние годы
пристальное внимание специалистов по электроприводам привлекают синхронные
управляемые двигатели, которые имеют также название бесколлекторные двигатели
постоянного тока, или вентильные двигатели. По электромеханическому
преобразованию энергии они ничем не отличаются от классических синхронных
машин. Своеобразие их свойств и характеристик объясняется тем, что питание их
обмоток осуществляется от специальных коммутаторов или инверторов напряжения,
управляемых от датчика положения ротора. Управление преобразователями
напряжения от датчика положения ротора обеспечивает строгое соответствие
частоты токов обмоток машины частоте вращения ротора, аналогично тому, как
это происходит в коллекторных машинах постоянного тока.
. Основные
типы шаговых двигателей - с активным ротором, реактивные и индукторные имеют
либо обе, либо одну из двух составляющих момента (2). В последние годы
пристальное внимание специалистов по электроприводам привлекают синхронные
управляемые двигатели, которые имеют также название бесколлекторные двигатели
постоянного тока, или вентильные двигатели. По электромеханическому
преобразованию энергии они ничем не отличаются от классических синхронных
машин. Своеобразие их свойств и характеристик объясняется тем, что питание их
обмоток осуществляется от специальных коммутаторов или инверторов напряжения,
управляемых от датчика положения ротора. Управление преобразователями
напряжения от датчика положения ротора обеспечивает строгое соответствие
частоты токов обмоток машины частоте вращения ротора, аналогично тому, как
это происходит в коллекторных машинах постоянного тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.