Лекция 17
РЕЖИМЫ РАБОТЫ И ХАРАКТЕРИСТИКИ ШАГОВЫХ
ДВИГАТЕЛЕЙ
Работа шагового двигателя считается
устойчивой, если он работает без потерь шага, т.е. если ротор переходит из
одного устойчивого состояния в другое при каждом шаге результирующего вектора
м.д.с. обмоток управления. Характер движения ротора и многие величины,
определяющие работу шагового двигателя, зависят от частоты управляющих импульсов
![]() .
.
Статический режим (![]() )
характеризуется протеканием постоянного тока по обмоткам управления шагового
двигателя и неизменностью положения вектора результирующей м.д.с. Основная
характеристика этого режима - зависимость синхронизирующего момента двигателя
от электрического угла рассогласования
)
характеризуется протеканием постоянного тока по обмоткам управления шагового
двигателя и неизменностью положения вектора результирующей м.д.с. Основная
характеристика этого режима - зависимость синхронизирующего момента двигателя
от электрического угла рассогласования ![]() , т.е. угла
между осью ротора и направлением вектора м.д.с. управления.
Для двигателей с симметричным ротором эта зависимость в первом приближении
может быть принята синусоидальной, (рис. 11,а):
, т.е. угла
между осью ротора и направлением вектора м.д.с. управления.
Для двигателей с симметричным ротором эта зависимость в первом приближении
может быть принята синусоидальной, (рис. 11,а):
![]() .
.
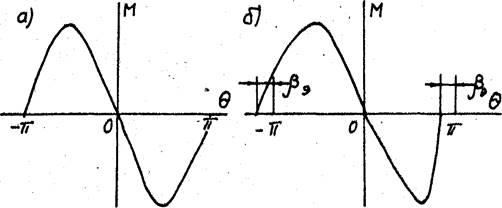
Рис. 11. Статический синхронизирующий момент: а – для симметричного ротора; б - для несимметричного
В двигателях с несимметричным
ротором кривая синхронизирующего момента несимметрична (рис. 11,б). Положительная
и отрицательная полуволны кривой остаются равновеликими по площади, но имеют
разную протяженность по оси ![]() .
.
Поскольку при ![]() синхронизирующий
момент равен нулю, возникает статическая ошибка в положении ротора. Величина
этой ошибки зависит от момента нагрузки
синхронизирующий
момент равен нулю, возникает статическая ошибка в положении ротора. Величина
этой ошибки зависит от момента нагрузки ![]() и
уменьшается с увеличением максимального момента двигателя
и
уменьшается с увеличением максимального момента двигателя ![]() .
.
Зоной статической устойчивости
![]() называется
интервал угловых положений ротора, в пределах которого ротор возвращается в
исходное положение. При нулевом статическом моменте точка статического
равновесия – «0», а точки неустойчивого равновесия - А и В, т.е. зона
статической устойчивости АОВ симметрична (рис. 12)
называется
интервал угловых положений ротора, в пределах которого ротор возвращается в
исходное положение. При нулевом статическом моменте точка статического
равновесия – «0», а точки неустойчивого равновесия - А и В, т.е. зона
статической устойчивости АОВ симметрична (рис. 12)
![]() .
.
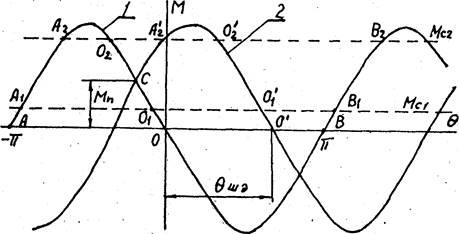 |
Рис. 12. Зависимости синхронизирующего момента парового
двигателя от угла рассогласования ![]() для двух
устойчивых соседних положений
для двух
устойчивых соседних положений
Зоной динамической устойчивости
![]() называется
интервал угловых положений ротора, определенный с учетом сдвига кривой
синхронизирующего момента при очередном переключении обмоток. Для шаговых двигателей
с симметричным ротором
называется
интервал угловых положений ротора, определенный с учетом сдвига кривой
синхронизирующего момента при очередном переключении обмоток. Для шаговых двигателей
с симметричным ротором
![]() , и для шаговых двигателей с
несимметричным ротором
, и для шаговых двигателей с
несимметричным ротором
![]() .
.
Пусковым моментом шагового
двигателя
![]() называется
максимальный момент нагрузки, при котором возможен пуск двигателя, т.е. выполнение
им шага в заданном направлении. Величина этого момента определяется точкой C
пересечения исходной характеристики (кривая 1, рис.12) с характеристикой,
сдвинутой на один шаг (кривая 2, рис. 12). Если
называется
максимальный момент нагрузки, при котором возможен пуск двигателя, т.е. выполнение
им шага в заданном направлении. Величина этого момента определяется точкой C
пересечения исходной характеристики (кривая 1, рис.12) с характеристикой,
сдвинутой на один шаг (кривая 2, рис. 12). Если ![]() , то ротор
(точка
, то ротор
(точка![]() ) при
переключении обмоток управления окажется вне зоны статической устойчивости
) при
переключении обмоток управления окажется вне зоны статической устойчивости ![]() и пуска не
произойдет.
и пуска не
произойдет.
Квазистатический режим
шагового двигателя (режим отработки единичных шагов) соответствует
частоте управляющих импульсов при которой переходный процесс на каждом шаге
заканчивается к началу следующего шага, т.е. угловая скорость ротора ![]() в начале каждого
шага равна нулю (рис. 13).
в начале каждого
шага равна нулю (рис. 13).
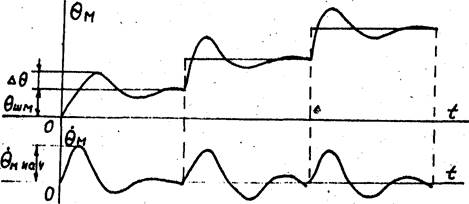 |
Рис. 13 Переходные процессы в шаговом двигателе при отработке единичных шагов
Основными показателями этого режима
являются перерегулирование, максимальное значение угловой скорости
ротора  и время затухания
переходного процесса
и время затухания
переходного процесса ![]() .
Установившийся режим работы шагового двигателя соответствует постоянной
частоте управляющих импульсов, причем
.
Установившийся режим работы шагового двигателя соответствует постоянной
частоте управляющих импульсов, причем  . Вращение
ротора с некоторой средней скоростью сопровождается колебаниями относительно
точки устойчивого равновесия. Амплитуда этих колебаний достигает
наибольшего значения при частоте управляющих импульсов, совпадающей с
собственной частотой колебаний ротора. Она находится из дифференциального
уравнения движения ротора
. Вращение
ротора с некоторой средней скоростью сопровождается колебаниями относительно
точки устойчивого равновесия. Амплитуда этих колебаний достигает
наибольшего значения при частоте управляющих импульсов, совпадающей с
собственной частотой колебаний ротора. Она находится из дифференциального
уравнения движения ротора
 .
.
Считая ![]() малой
величиной (в окрестности точки устойчивого равновесия), получим
малой
величиной (в окрестности точки устойчивого равновесия), получим
![]()
![]() откуда
откуда
![]() .
.
Степень демпфирования колебаний ротора шагового двигателя зависит от момента сопротивления (сухого трения) и внутреннего демпфирования, обусловленного преобразованием механической энергии ротора в электромагнитную, т.е. за счет наведения э.д.с. вращения в обмотках управления, которая вызывает появление в них дополнительных токов. Эти токи, взаимодействуя с вызвавшими их потоками, создают демпфирующий момент. В шаговых двигателях активного типа э.д.с. наводится потоком ротора, в индукторных и реактивных – переменной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




