Итак, в координатах q1 и q2 задаемся некоторым (пожалуй, предельно -допустимым) начальным значением параметра ПИД регулятора q0i. На отрицательной полуоси ординат q1 отмечаем два отрезка равные q0i и 2q0i.Через точки b и d проводим прямую, соответствующую уравнению q1= - (q2+q0i).
Слева в том же масштабе в координатных осях q1 и q0 проводим прямую О - В, соответствующую уравнению q0=-q1. На этом заканчиваются вспомогательные построения, связанные с использованием неравенств (20. 1. 9),(20. 2. 9). В результате получаются треугольники ОАВ и bcd, только внутри которых могут располагаться допустимые значения варьируемых параметров ДПФ регулятора q0, q1 q2.
Теперь задаемся значением q0 (точка 1), выбираемзначение q1 (точка 2) и находим q2 (точка 4). По формулам (20.3. 9) - (20. 5. 9) заканчивается процесс расчета параметров регулятора.
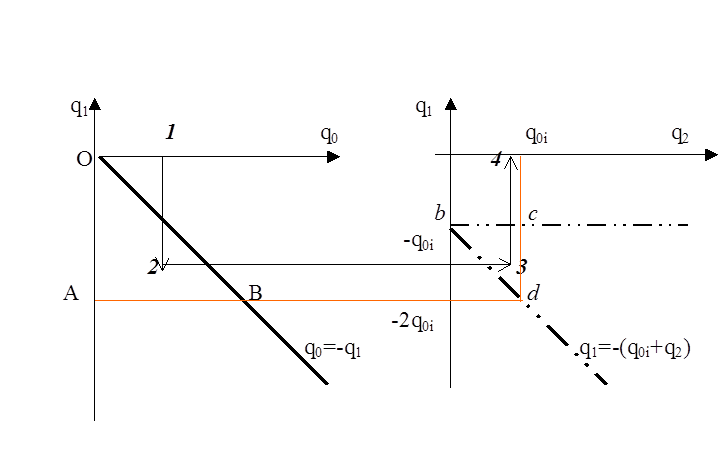 |
Рис. 5.9.
Заключение Этот метод заимствован нами из литературы [29]. Были предложены и другие методы расчета параметров ДПФ регуляторов при больших интервалах квантования. Например, метод" весовых коэффициентов" (С. Ковчин) и метод " квадратичных оценок с использованием суммарных модифицированных наименьших квадратов" (K C. Rattan) (США). В обоих последних случаях авторы методов ставили целью получить такие настройки регуляторов ДСАУ, чтобы их динамические характеристики были близки к подобным характеристикам аналоговых систем
Скорректировано 17.01.08., вторая коррекция 04.04.08. третья коррекция 18.04.10
Четвертая коррекция 12.04.2011.
Приложение 9
К расчету желаемых характеристик для динамического синтеза ДСАУ
с л.а.х. вида 2 - 1 - 2 - 3 - 2 - 1 - 0
Эти материалы не относятся к содержания лекции 9, а необходимы для выполнения задач синтеза ДСАУ методом В.А. Бесекерского.
Задана передаточная функция (ПФ) модели аналогового объекта
![]() (1)
(1)
Функция (1) разбивается на модель ПИ регулятора и модель объекта с экстраполятором нулевого порядка
 (2)
(2)
Для вычисления K0 (z,0)выполним разложение дроби
![]() (3)
(3)
Коэффициент k2v сохраним как общий сомножитель. Постоянные будут такими.
![]() (4)
(4)
Введем соотношение
![]() (5)
(5)
Из
формул (2) первый сомножитель (при интегрировании прямоугольниками) ![]()
![]() ,
(6)
,
(6)
и второй сомножитель, где ![]()
 .(7)
.(7)
Полное произведение двух сомножителей дает ДПФ разомкнутой системы и дискретным ПИ регулятором и астатическим аналоговым объектом третьего порядка в таком виде.
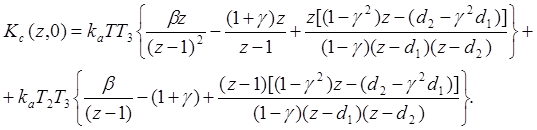 (8)
(8)
Раскрытие сложного выражения (8) упростим следующим образом. Общий знаменатель имеет полином N(z),представленный в таком виде:

Полином числителя M(z) имеет шесть слагаемых, которые выпишем отдельно, преобразовав их общие множители. Для первых трех слагаемых множитель
 . (9)
. (9)
Аналогично
(9) для последних трех слагаемых общий множитель  (10)
(10)
Если обозначить выражение (10), как B1, тогда (9) приобретет такую форму:
![]() (11)
(11)
В методе "динамического синтеза" для ДСАУ значения M, β, и γ задаются, поэтому B1 и B2 становятся в каждом случае постоянными числами. Приступим теперь к записи коэффициентов числителя
![]() ;
;
![]() ;
;
![]() .
(12)
.
(12)
![]() ;
;
![]() ;
;
![]() .
.
Преобразования Mi (z) достаточны, чтобы вычислить полином числителя ДПФ
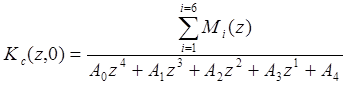 (13)
(13)
Последний необходимый для "динамического синтеза" параметр - "добротность по ускорению" ka=ω02 также вычисляется в относительных единицах.
После несложных преобразований можно получить:
![]() относительная угловая
скорость. (14)
относительная угловая
скорость. (14)
Итак, при расчете таблиц показателей качества ДСАУ в
функции показателя колебательности "М" при каждом значении M=const
и β =const рассчитывается свое значение ![]() .
В этом состоит одно из различий синтеза ДСАУ от синтеза САУ.
.
В этом состоит одно из различий синтеза ДСАУ от синтеза САУ.
Прилагаемые к тексту лекций таблицы рассчитаны при β=0,05; 0,1; 0.2; 0,5; 1,0 и 2,0. Значения М=1,05; 1,1; 1,2; 1,3; 1,5; 1,7; !,8; 1,9; 2.0; 2,2.
Скорректировано. 02. 04. 09. Повторно - . 18. 04. 09. И 18. 04. 10
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.