![]() .
(7. 9)
.
(7. 9)
Вопрос об "усечении" степени ДПФ регулятора упрощается. Специальные исследования доказали, что алгоритм решения задачи (7. 9) проще, чем (5.9) - (6. 9).
Третий способ. На основании того же выражения(4. 9) получаем искомую ДПФ регулятора в преобразованной форме следующего вида:
![]() , (8.
9)
, (8.
9)
где ![]() изображения
"выхода" и "входа" модели скорректированной ДСАУ в
"z" области.
изображения
"выхода" и "входа" модели скорректированной ДСАУ в
"z" области.
 |
|||
Рис. 2. 9.
Если принять ![]() в
форме
в
форме ![]() [см. формулу (3. 8), лк.
8] и вычислить её для различных типовых структур ДСАУ и
g(t)=1(t), то
[см. формулу (3. 8), лк.
8] и вычислить её для различных типовых структур ДСАУ и
g(t)=1(t), то ![]() . Тогда выражение
(8. 9) приобретает такую форму:
. Тогда выражение
(8. 9) приобретает такую форму:
![]() (8. 9)1
(8. 9)1
Форма (8. 9)1 наиболее близко
соответствует названию метода. В самом деле! ![]() в
своих коэффициентах несет информацию о переходной функции
скорректированной системы, а [1-
в
своих коэффициентах несет информацию о переходной функции
скорректированной системы, а [1-![]() ]
- аналогичную информацию об ошибке. Деление же полиномов есть ДПФ разомкнутой
скорректированной ДСАУ.
]
- аналогичную информацию об ошибке. Деление же полиномов есть ДПФ разомкнутой
скорректированной ДСАУ.
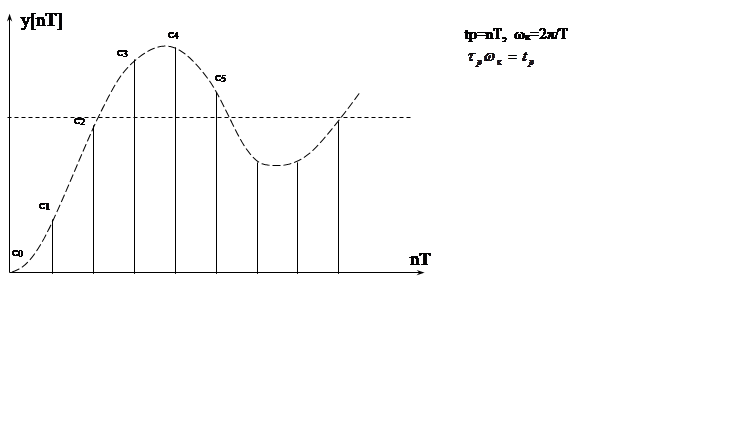
Пусть будут вычислены семь первых значений ![]() (см. рис. 2. 9.) с0
с6..
(см. рис. 2. 9.) с0
с6..
Тогда произведение ![]() (1-z-1)=
(1-z-1)= ![]() можно раскрыть так:
можно раскрыть так:
![]() (9. 9)
(9. 9)
где ![]() и
и ![]() .
.
Аналогично, выражение ![]() , будет равно:
, будет равно:
![]() (10. 9)
(10. 9)
где коэффициенты ![]() имеют те же значения, что и в формуле (9.9).
имеют те же значения, что и в формуле (9.9).
После этих преобразований формула (8. 9)1 может изображаться различно, а именно:
 ,
(8. 9)11
,
(8. 9)11
или
 .
(8.9)111
.
(8.9)111
Реализация синтеза предполагает выполнения следующих условий.
1. Форма (8.9)11предпочтительнее
для реализации регулятора, чем форма (8.9)111,ввиду сложности
вычисления коэффициентов ![]() .
Например,
.
Например, ![]() . ср1=р1,
. ср1=р1,
ср2=р21+р2.,
но уже![]() и дальнейшая сложность этих выражений возрастает.
и дальнейшая сложность этих выражений возрастает.
2. Чтобы коррекция была физически
реализуема, нужно иметь равный или меньший порядок полинома числителя Cp(z-1)(mр)
от порядка полинома знаменателя Qp(z-1)(nр)в этих выражениях, т.е.m
p![]() np. В этом и состоит сущность "усечения"
степени
np. В этом и состоит сущность "усечения"
степени ![]() . Но обычно полином B(z)
на один два порядка меньше A(z). Тогда на столько же увеличивают
порядок полинома
. Но обычно полином B(z)
на один два порядка меньше A(z). Тогда на столько же увеличивают
порядок полинома ![]() , беря
дополнительные ординаты с6, с7 переходной функции
(рис.2. 9), но, не меняя порядок полинома
, беря
дополнительные ординаты с6, с7 переходной функции
(рис.2. 9), но, не меняя порядок полинома ![]() .
.
3. Пока не доказано какое количество интервалов "m" необходимо иметь для представления Yж(z-1) в формуле (8.9)!! и каково должно быть условие:![]() .Мы использовали первые семь
значений функции Yж(z-1)
при нулевых начальных условиях. Но можно ли получить адекватное
выражение для
.Мы использовали первые семь
значений функции Yж(z-1)
при нулевых начальных условиях. Но можно ли получить адекватное
выражение для
Dp(z,0) при последующих значениях функции Yж(z-1) и ненулевых начальных условиях?
Покажем применение методики на конкретном примере.
Аналоговый объект
управления имеет ПФ ![]()
Совместно с экстраполятором нулевого порядка, ДПФ объекта будет такой:
![]() ,
(11. 9)
,
(11. 9)
где ![]() - интервал квантования, kv2
- добротность объекта по скорости
- интервал квантования, kv2
- добротность объекта по скорости
Теперь перепишем K0(z)
![]() , (11.9!
, (11.9!
где: ![]()
Поделив слагаемые числителя и
знаменателя ![]()
 ,
(11. 9)!!
,
(11. 9)!!
где ![]() .
.
Такими процедурами привели ДПФ объекта управления к необходимой для синтеза регулятора форме (11. 9)!!
Дискретный пропорционально - интегральный регулятор имеет ДПФ:
![]() .
(12. 9)
.
(12. 9)
Прототипом ДСАУ является аналоговая система с желаемой л.а.х. 2 - 1 - 2. Поэтому постоянные времени Т2 и Т3 находятся в известном соотношении.

Перемножая выражения (11. 9) и (12. 9), в конечной форме получим:
![]() ,
(13. 9)
,
(13. 9)
где ![]()
![]() ,
,
![]() ,
, ![]()
![]()
![]() добротность системы
по ускорению.
добротность системы
по ускорению.
Чтобы разрешить (6. 9), (7. 9) или варианты (8. 9), воспользуемся табл. 1.,которая позволяет выбрать ординаты Yж(z)
Таблица1
Показатели качества цифровых автоматических систем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.