При конструировании регуляторов для управления технологическими процессами, постоянные времени которых измеряются минутами и часами, задают большие интервалы квантования, чтобы проще технически реализовать регулятор, "сильно не растягивая" рекуррентные соотношения, подобные (14. 9)*, из - за малости периода квантования Т. Тогда нужно использовать иные способы выбора приемлемых параметров регуляторов.
Наконец, интегрирование можно выполнить по способу прямоугольников (в двух вариантах) или "методом трапеций" и иными способами "использования Z форм"2).
Две группы таких вопросов попытаемся пояснить в этом разделе
6. 9. 2.Анализ алгоритмов и расчет параметрически - оптимизируемых компенсационных регуляторов при малых интервалах квантования
Пропорциональный интегрально- дифференциальный (ПИД) регулятор в САУ реализует необходимые показатели качества. За счет пропорциональной составляющей он подавляет внешние помехи и второстепенные возмущения, за счет интегральной составляющей увеличивает быстродействие системы и исключает её статическую ошибку, за счет дифференциальной составляющей повышает устойчивость САУ. Исходная схема регулятора изображена на рис.1.9.
Вначале запишем алгоритм аналогового прототипа регулятора
 . (15. 9)
. (15. 9)
При малых интервалах квантования Т можно перейти без особой погрешности к следующему алгоритму:
![]() .
(16.9)
.
(16.9)
Алгоритм (16.9) не рекуррентен, поскольку для вычисления суммы РФ
_________________________________________________________________
2)Не будем здесь касаться, и пояснять разные приемы и методы численного интегрирования. Это предмет других учебных курсов, которые вы изучали.
нужно много блоков (регистров) памяти. Так - как u[n,0] на каждом такте вычисляется заново, то ошибки вычислений не накапливаются. В этом, пожалуй, единственное достоинство алгоритма (16. 9). Найдем рекуррентный алгоритм, предварительно вычислив u[(n-1),0] по формуле (16. 9).
![]() .
.
Вычитая полученное уравнение из предыдущего, после ряда простых преобразований получим:
![]() ,
(17. 9)
,
(17. 9)
где
 .
.
Видно, что (17. 9) соответствует рекуррентному алгоритму вычисления u[n], так - как к сумме вычисленных в его правой части значений прибавляется только u[n-1].
Положим,
что ![]() оригиналы, изображения
которых есть
оригиналы, изображения
которых есть ![]() . Тогда из
выражения (17. 9) по известным правилам (см. гл. 2, раздел 2. 4) получим ДПФ
ПИД-регулятора в такой форме
. Тогда из
выражения (17. 9) по известным правилам (см. гл. 2, раздел 2. 4) получим ДПФ
ПИД-регулятора в такой форме
![]() .
(18. 9)
.
(18. 9)
Несложно получить рекуррентный алгоритм программной реализации во временной области и схему аппаратной реализации регулятора по только что изложенным описаниям.
6. 9. 3. Алгоритмы параметрически - оптимизируемых компенсационных регуляторов при больших интервалах квантования
При больших интервалах Т не сохраняется соответствие между разностями РФ и производными непрерывных функций, суммами РФ и интегралами от непрерывных функций. Поэтому нельзя воспользоваться соответствиями между qi и параметрами аналогового ПИД-регулятора, как в формуле (17. 9). Нужны другие условия для определения qi в выражении (18. 9), которое справедливо при любых интервалах квантования.
Пусть выход ПИД-регулятора имеет вид, изображенный на рис. 4.9.
Если принять: ![]()
Следовательно:
![]()
 (19. 9)
(19. 9)
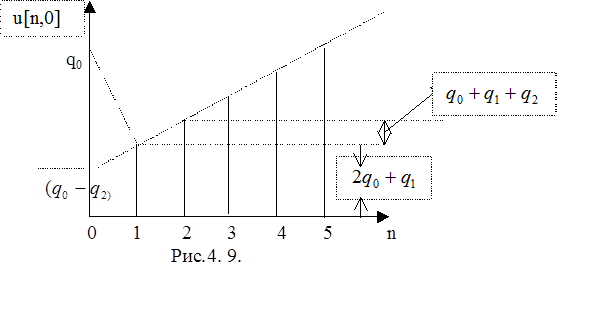 |
При u[1]<u[0], как изображено на рис.4. 9, из условий (19. 9) можно получить следующие полезные неравенства:
q0>2q0+q1, откуда q1<-q0, поскольку q0>0; (20.1. 9)
q2>-(q1+q0), поэтому q2>0; (20.2. 9)
k=(q0-q2) коэффициент передачи ПИД-регулятора; (20.3. 9)
![]() относительная добротность
по скорости регулятора; (20.4. 9)
относительная добротность
по скорости регулятора; (20.4. 9)
![]() относ. постоянная
дифференцирования регулятора (20.5. 9).
относ. постоянная
дифференцирования регулятора (20.5. 9).
Теперь ДПФ ПИД-регулятора запишем так:
![]() (21.9)
(21.9)
Вычислить параметры регулятора при больших интервалах квантования можно по выражениям (20.1. 9) - (20. 5. 9), если воспользоваться вспомогательными графиками, построенными на рис.5.9.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.