· Знакоопределенная V-функция. Это такая функция, которая во всем пространствеG[V(t)] имеет один знак, кроме начала координат, где она принимает нулевое значение.
· Знакопостоянная V-функция – функция, принимающая во всем пространствеG[V(t)] либо значения одного знака, либо нулевые значения (включая начало координат).
|
|
Одновременно с функцией Ляпунова рассматривается
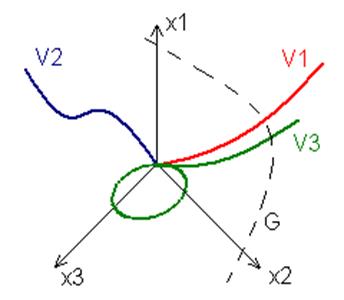
другая функция: W, На рисунке изображены V1 , V2 – знакоопределенные, а V3 - знаконеопределенная функция. Значит, если функции V1 и V2 являются положительно определенными, то для устойчивости соответствующего процесса достаточно, чтобы функции W1 и W2 были отрицательными или тождественно равнялись нулю. |
Однако для функции V2, функция W2 принимает и положительные и отрицательные и нулевые значения. Поэтому достаточному условию устойчивости "в большом" удовлетворяют лишь динамические процессы НСАУ с V-функциями Ляпунова подобными V1. НСАУ второй структуры (V2 , W2) станет устойчива "в малом". Функция V3 – знаконеопределенная. Следовательно, динамические процессы в третьей НСАУ неустойчивы "в большом".
Здесь V и W – "принадлежат", соответствуют процессу, системе.
Для прямого метода устойчивости А. М. Ляпуновым сформулировано две теоремы.
Теорема 1. Достаточным условием устойчивости динамических процессов "в большом" будет знакоопределенность V-функции и знакопостоянство W функции противоположного знака.
Теорема 2. Если при знакоопределенности V-функции, W-функция также будет знакоопределенна (но другого знака), то динамический процесс в НСАУ будет устойчив асимптотически "в большом" (то есть заканчиваться покоем системы).
Сложность применения прямого метода Ляпунова для оценки устойчивости динамических процессов "в большом" заключается в нахождении V-функций для конкретных моделей НСАУ. К настоящему времени функции Ляпунова построены практически для всех наиболее важных классов нелинейных систем, встречающихся на практике.
Например, для системы с единственной нелинейностью φ(σ) функцию Ляпунова А.И. Лурье (совместно с В.И. Постниковым) предложил принять в виде:
 , (10)
, (10)
где
Q - матрица размерности n´n – положительно определенная (поэтому слагаемое
![]() будет
знакоположительной величиной), а q – некоторое положительное число. Если нелинейность φ(σ) принадлежит
классу "0 - К", то есть
будет
знакоположительной величиной), а q – некоторое положительное число. Если нелинейность φ(σ) принадлежит
классу "0 - К", то есть ![]() , то и сама функция Ляпунова будет знакоопределенной.
, то и сама функция Ляпунова будет знакоопределенной.
Кроме того, если функцию Ляпунова можно построить, то через нее удается выразить динамические показатели качества системы: перерегулирование и время переходного процесса.
Исследование устойчивости линейных систем с помощью прямого метода Ляпунова
Рассмотрим линейную стационарную систему ![]() . (11)
. (11)
Пусть положение равновесия системы (11) находится в
точке ![]() . Будем искать функцию Ляпунова в
виде
. Будем искать функцию Ляпунова в
виде ![]() (12)
(12)
с положительно определенной симметрической матрицей Н.
Производная этой функции в силу уравнения (11) имеет вид:
![]() . (13)
. (13)
Получили квадратичную форму. Поэтому чтобы производная
по времени от функции Ляпунова (12) была отрицательно определенной,
квадратичная форма (13) должна быть отрицательной, а матрица ![]() - отрицательно определенной.
Обозначим
- отрицательно определенной.
Обозначим
![]() . (14)
. (14)
Кроме
того ![]() , то есть матрица G –
симметрическая. Уравнение (14) относительно матрицы H называется
уравнением Ляпунова.
, то есть матрица G –
симметрическая. Уравнение (14) относительно матрицы H называется
уравнением Ляпунова.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.