С этой же целью у автомобилей выполняют управляемыми передние и задние колеса. Особенно часто это используется у многоосных автомобилей. Если повернуть передние и задние колеса двухосного автомобиля на одинаковые углы в противоположные стороны, то радиус поворота уменьшится вдвое по сравнению с поворотом колес только одного моста. Мгновенный центр поворота О у такого автомобиля находится внутри его базы и при отсутствии бокового увода расположен на одинаковом расстоянии от осей переднего и заднего мостов, равном L/2 (рис. 9.6). Кинематический радиус поворота Rп в этом случае определяется по формуле
![]() . (9.19)
. (9.19)
Однако такая схема поворота имеет и недостатки: затрудняется отъезд автомобиля от стенки или бордюра тротуара, если он стоял вплотную к ним; ухудшается устойчивость движения при входе автомобиля в поворот. Ухудшение устойчивости объясняется тем, что на начальном и конечном этапах входа в поворот угол увода колес заднего моста меняет свое направление, в результате изменяется и направление действия боковой силы на колеса. Это приводит к тому, что на начальном этапе возникает дестабилизирующий момент, а затем он изменяется на стабилизирующий, способствующий возврату колес в нейтральное положение.
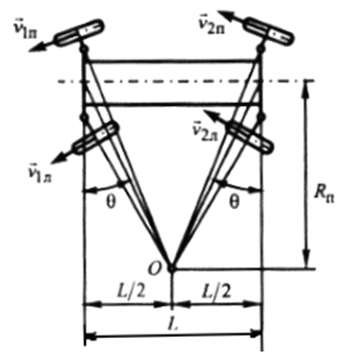
Рисунок 9.6 - Схема поворота двухосного автомобиля со всеми управляемыми колесами
Отметим также, что при необходимости уменьшения радиуса поворота Rп более эффективно уменьшать базу автомобиля L, чем увеличивать углы поворота управляемых колес θ.
9.4. Управляемость гусеничной машины
Поворот гусеничной машины осуществляется за счет рассогласования скоростей гусениц, одной из которых (забегающей) придают более высокую скорость по сравнению с другой (отстающей). Движение машины на повороте можно рассматривать как вращательное в плоскости дороги вокруг мгновенного центра О (рис. 9.7). при этом каждая из гусениц по мере перемещения по дуге окружности радиусом R1 или R2 поворачивается на некоторый угол вокруг своего центра поворота – соответственно О1 и О2. Центр поворота машины и мгновенные центры поворота каждой из гусениц расположены на одной линии О-О1-О2, которая в общем случае соединяет центры давления гусениц и не совпадает с поперечной осью а-а, проходящей через середины опорной поверхности гусениц.
Радиус поворота часто представляют в виде относительной величины, за единицу длины которой принята половина ширины колеи машины Вк
ρц=2Rц/Вк. (9.20)
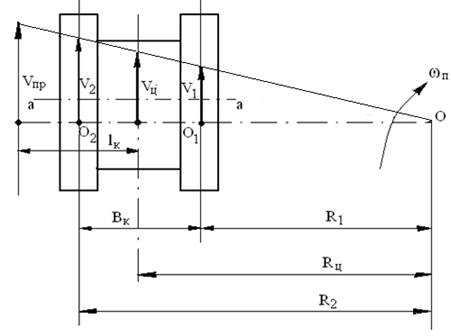
Рисунок 9.7 – План скоростей при движении гусеничной машины на повороте
Кинематическим фактором поворота гусеничной машины принято считать
qк=2lк/Вк, (9.21)
где lк – расстояние от продольной оси симметрии машины до точки приложения вектора скорости Vпр ее прямолинейного движения на плане скоростей.
Возможны три варианта движения машины на повороте в сравнении с режимом прямолинейного движения:
1) скорость точки геометрического центра машины снижается Vц<Vпр;
2) скорость на повороте сохраняется равной скорости прямолинейного движения Vц=Vпр;
3) скорость на повороте Vц=0, машина поворачивается на месте при одинаковой скорости гусениц, вращающихся в противоположные стороны. Тот или иной скоростной режим поворота определяется типом механизма поворота.
Простой дифференциальный механизм, используемый в качестве механизма поворота, кинематически обеспечивает поворот гусеничной машины с минимальным радиусом, равным половине ширины колеи, т.е. вокруг центра отстающей гусеницы. При полном торможении одной из полуосей другая будет вращаться с удвоенной угловой скоростью ω2=2ω0. Тогда Vц=Vпр и
Rц.min=0,5Bк. (9.22)
Минимальный радиус поворота машины с двойным дифференциалом зависит от передаточного числа дифференциала (iдиф=2,7-3,0), поскольку Rц.min=0,5Bкiдиф.
Минимальный радиус поворота машины с бортовыми фрикционами осуществляется при отключении отстающей гусеницы от двигателя. В то же время ведущее колесо забегающей гусеницы придает ей скорость прямолинейного движения. При ω1=0 минимальный радиус поворота Rц.min=0,5Bк, а скорость Vц=0,5Vпр.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.