Поворотная ширина автомобиля по следу колес Вп равна разности расстояний от центра О осей следов наиболее удаленного от него и наиболее приближенного к нему колес:
Вп=Rmin-Rв.min. (9.10)
Значение Вп в международных и национальных нормативных документах не нормируется, за исключением Германии, где Вп≤5,5 м.
Габаритная полоса движения Вгаб равна разности радиусов поворота точек, наиболее удаленной и наиболее приближенной к центру поворота
Вгаб=Rгаб.max-Rгаб.min. (9.11)
Правилами ЕЭК ООН № 36, 102, 107 для одиночных и сочлененных автобусов, а также грузовых автопоездов с укороченным сцепными устройствами установлена габаритная полоса движения Вгаб=7,2 м при Rгаб.max=12,5 м.
Удельная сила тяги Рт.уд, необходимая для совершения поворота, представляет собой отношение касательной силы тяги на ведущих колесах к силе тяжести автомобиля Ga=mag при повороте с минимальным радиусом и скоростью Vmin=5 км/ч
Рт.уд=Мк.в/magrк, (9.12)
где Мк.в – суммарный вращающий момент на ведущих колесах для преодоления суммарного момента сопротивления качению ΣМf при движении автомобиля с минимальным радиусом поворота Rmin.
Чем меньше Рт.уд, тем меньше нагружается двигатель при переходе автомобиля от прямолинейного движения к повороту.
Коэффициент использования силы сцепления колес Кφi при повороте определяется для i-го моста и характеризует потенциальную возможность автомобиля к совершению круговых поворотов.
Для АТС с управляемыми передними и задними колесами кинематический радиус поворота Rп определяется по формуле
Rп=L/2tgӨ. (9.13)
Для уменьшения радиуса поворота Rп наиболее эффективно уменьшать базу автомобиля L, чем увеличивать углы поворота управляемых колес Ө.
Критическую скорость (м/с) автомобиля по управляемости при жестких в поперечном направлении шинах колес (отсутствие бокового увода) рассчитывают по выражению
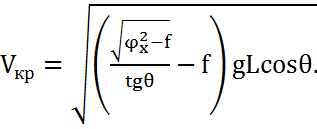 (9.14)
(9.14)
Поворот автомобиля с ведущими задними колесами возможен только в том случае, если сцепление управляемых колес с дорогой больше толкающего усилия
φхcosӨ≥f. (9.15)
Если коэффициент сопротивления качению f больше произведения коэффициента сцепления φх на косинус угла поворота управляемых колес Ө, то управляемые колеса будут двигаться юзом и поворот не произойдет. Особенно это проявляется на скользкой дороге и на снежном покрове.
Условие осуществления поворота по сцеплению с дорогой автомобиля с передними ведущими колесами
φх≥f. (9.16)
Если сопоставить выражение (9.15) и (9.16), то можно сделать вывод, что управляемость по сцеплению у АТС с передними ведущими колесами выше, чем у автомобилей с задними ведущими колесами.
Наибольшее влияние бокового увода колес на поворот автомобиля проявляется при движении с высокой скоростью и малых углах поворота управляемых колес. Действительный радиус поворота автомобиля с учетом бокового увода
Rп1≈L/(Ө+δув2-δув1), (9.17)
δу1, δу2= углы бокового увода шин колес соответственно передней и задней осей, рад.
Угол поворота управляемых колес при наличии бокового угла
Ө=[(L/Rп1)-(δув2-δув1)]. (9.18)
Критическая скорость автомобиля по управляемости с учетом бокового увода определяется по формуле (8.3).
Взаимосвязи кинематического Rп и действительного Rп1 радиусов поворота с углом поворота управляемых колес, установленные по (9.8) и (9.17) в диапазоне ЄӨ (0-Өmax) имеют вид (рис. 9.4)
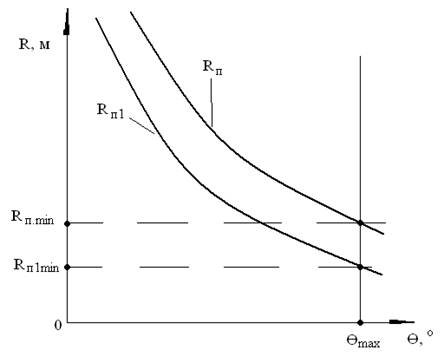
Рисунок 9.4 – Влияние угла поворота управляемых колес на кинематический и действительный радиусы поворота автомобиля
Маневренность автопоездов значительно хуже маневренности одиночных автомобилей. Это обусловлено смещением прицепа (или полуприцепа) к центру поворота. Для уменьшения габаритов поворота длинных автопоездов управляемыми делают колеса полуприцепа. Схема поворота такого автопоезда показана на рис. 9.5.
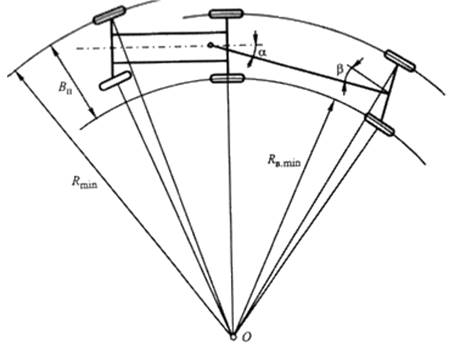
Рисунок 9.5 - Схема поворота автопоезда с управляемыми колесами полуприцепа
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.