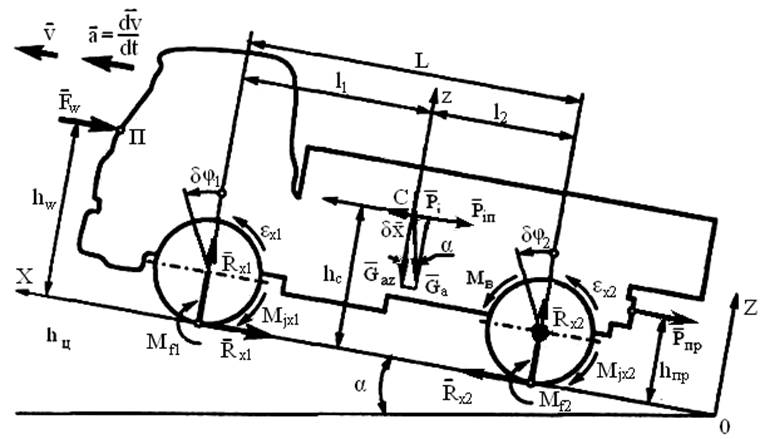
Рисунок 2.1 - Воздействия на автомобиль при прямолинейном движении
При возникновении внешнего скольжения
реакции ![]() будут совершать работу. Однако эта
работа будет отрицательной, так как реакции
будут совершать работу. Однако эта
работа будет отрицательной, так как реакции ![]() в
данном случае — это силы трения. Поэтому внешнее скольжение сопровождается
дополнительными потерями, компенсация которых на тяговом режиме осуществляется
за счет энергии двигателя, а на тормозном режиме — за счет кинетической энергии
автомобиля.
в
данном случае — это силы трения. Поэтому внешнее скольжение сопровождается
дополнительными потерями, компенсация которых на тяговом режиме осуществляется
за счет энергии двигателя, а на тормозном режиме — за счет кинетической энергии
автомобиля.
2.2. Внешние воздействия на автомобиль
2.2.1. Сила тяжести автомобиля
Сила тяжести
обусловлена массой автомобиля mа. Вектор
силы тяжести ![]() приложен в центре масс автомобиля (точка
С на рис. 2.1) и совпадает по направлению с вектором ускорения свободного
падения
приложен в центре масс автомобиля (точка
С на рис. 2.1) и совпадает по направлению с вектором ускорения свободного
падения ![]() :
:
![]() . (2.1)
. (2.1)
Составляющую ![]() ,
параллельную поверхности дороги, называют силой сопротивления подъему
и обозначают
,
параллельную поверхности дороги, называют силой сопротивления подъему
и обозначают ![]() . Модуль этой силы
. Модуль этой силы
Рi=Gasinα=magsinα. (2.2)
На автомобильных дорогах с твердым покрытием углы α обычно не превышают 4-5°. Тогда sinα≈tgα=i, а модуль силы Pi вычисляют по формуле
|Pi|=magi. (2.3)
Сила Pi стремится скатить автомобиль под уклон, поэтому ее называют также скатывающей силой, что соответствует ее физическому смыслу.
В дорожном строительстве величину i называют продольным уклоном, дороги.
При движении на спуске вектор силы ![]() совпадает по направлению с вектором
скорости
совпадает по направлению с вектором
скорости ![]() , поэтому
, поэтому ![]() становится
движущей силой. В связи с этим угол α и уклон дороги i считают положительными при движении автомобиля на
подъеме и отрицательными — на спуске.
становится
движущей силой. В связи с этим угол α и уклон дороги i считают положительными при движении автомобиля на
подъеме и отрицательными — на спуске.
Составляющая силы тяжести Gaz=magcosα, направленная
перпендикулярно поверхности дороги, непосредственного воздействия на движение
автомобиля не оказывает, так как ее вектор перпендикулярен вектору скорости ![]() . Но она определяет нормальные реакции
дороги и, следовательно, влияет ни сопротивление качению и сцепление колес с
дорогой.
. Но она определяет нормальные реакции
дороги и, следовательно, влияет ни сопротивление качению и сцепление колес с
дорогой.
2.2.2. Сопротивление качению
Сопротивление качению автомобиля определяется суммарным моментом сопротивления качению всех его колес:
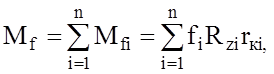 (2.4)
(2.4)
где fi — коэффициент сопротивления качению i-гo колеса (зависит от режима качения); Rzi — нормальная реакция дороги на i-е колесо; rкi — радиус качения i-гo колеса; n — количество колес автомобиля.
В соответствии с принятыми допущениями относительно модели прямолинейного движения автомобиля левые и правые колеса i-гo моста объединены в одно колесо. Поэтому Rzi представляет собой суммарную нормальную реакцию дороги на все колеса i-гo моста. Это же касается и параметров fi и rкi.
Сопротивление качению зависит от конструктивных параметров шин: количества слоев и расположения нитей корда, толщины и состояния протектора. Уменьшение количества слоев корда, толщины протектора, увеличение наружного диаметра шины, применение синтетических материалов с малыми гистерезисными потерями способствуют снижению сопротивления качению. С увеличением степени изношенности шины значение fi уменьшается.
Так как все параметры формулы (2.4) переменные, это создает неудобства ее использования при проведении сравнительной оценки показателей тягово-скоростных свойств автомобиля. Поэтому обычно пользуются осредненным значением коэффициента сопротивления качению f, считая его одинаковым для всех колес автомобиля. Принимают также одинаковое значение радиуса качения для всех колес, равное rк. Формула (2.4) в этом случае приводится к виду
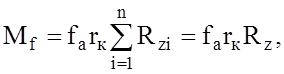 (2.5)
(2.5)
где Rz — суммарная нормальная реакция дороги на колеса автомобиля.
Значение f в рассматриваемом случае выбирается из таблицы 1.1, полагая f=f0, или вычисляется по формуле (1.5).
С учетом, что Rz=Rz1+Rz2=Gaz=magcosα, момент сопротивления качению всех колес автомобиля
Mf=fаrкmаgcosα. (2.6)
При малых углах продольного уклона дороги cosα≈1, тогда
Mf=farкmag. (2.7)
2.2.3. Сопротивление воздуха
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.