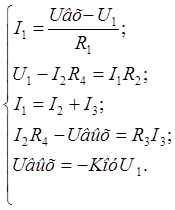
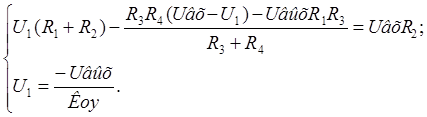
Исходная система уравнений по законам Ома и Кирхгофа для такой схемы будет иметь вид:
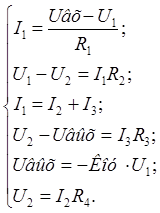 (17)
(17)
Где Коу – коэффициент усиления операционного усилителя (в идеальном случае – равен бесконечности)
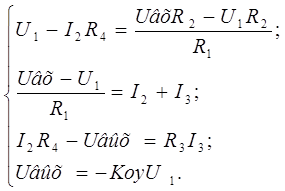
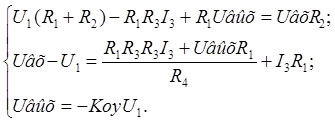
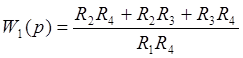
Решая данную систему уравнений получим, что передаточная функция такого безинерционного звена будет равна:
 (18)
(18)
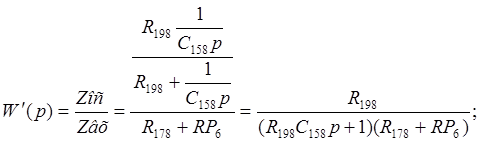
Вследствие того, что звено, выполненное на операционном усилителе А3 (регулятора скорости), имеет развязку по входному напряжению, выполненную с помощью повторителя напряжения А2, и напряжение U1=U2, то его передаточная функция будет иметь следующий вид:
![]() (19)
(19)
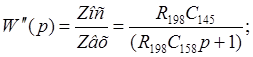
где W’ и W” – передаточные функции звена А3 относительно входа U1 и U2 соответственно.

![]() (20)
(20)
В случае, когда требуется пропорциональный регулятор, параметры элементов выбирают так, что R198=R178+P6, а С145=С158, тогда (20) Сворачивается в единицу, и передаточная функция всего регулятора скорости определяется из (18). То есть,
(21)
В регуляторе тока на операционном усилителе А1 выполнено простейшее безинерционное звено с передаточной функцией
 (22)
(22)
Звено на операционном усилителе А3 в регуляторе тока аналогично рассмотренному выше звену регулятора скорости. Используя ту же методику рассмотрения, получим для регулятора тока:
 ,
,
А с учётом безинерционного звена на операционном усилителе А1 получим общую передаточную функцию регулятора тока:
 (23)
(23)
Где К8 – передаточная функция потенциометра RP8.
3.4. Выбор элементов регуляторов.
Передаточная функция регулятора скорости определяется c учётом перехода от обозначений расчётной схемы к общим обозначениям, как

и должна быть равна, согласно расчёту

В схеме регулятора сопротивления R192 =R188= R194= 100 кОм, R193=68 кОм.

![]()

![]()

Получили, что RР5=1,6МОм. Однако, потенциометр RР5 имеет номинал в 1МОм, поэтому требуемый коэффициент передачи можно получить, увеличив сопротивление R192. Для этого последовательно ему впаивается дополнительное сопротивление номиналом 200К, в результате чего общее сопротивление R192 увеличивается на эту величину и становится равным 300К. Тогда:


![]()

В итоге получаем RP5=0,66 МОм, что меньше его номинала, то есть может быть получено, кроме того, остаётся некоторый запас для подстройки. В качестве дополнительного сопротивления можно применить сопротивление типа МЛТ.
При этом С145=С158=1мкФ (постоянные), а потенциометр RР6 устанавливается таким образом, что R178+RP6=R198, то есть, к примеру, если будет впаяно сопротивление R198=200 кОм, то потенциометр устанавливается на 100 кОм. (сопротивление R178 постоянно и равно 100 кОм.)
Для регулятора тока имеем передаточную функцию
, которая должна быть равна

Номиналы имеющихся элементов схемы следующие: С95=0,1мкФ, С87=0,022мкФ, R133=R131=22КОм.
Из приведённых выше выражений имеем, что постоянная времени регулятора Т равна:
![]()
Откуда
 КОм, что приемлемо при номинале RP9=1 МОм.
КОм, что приемлемо при номинале RP9=1 МОм.
Далее определяем коэффициент передачи потенциометра RР8
Учитывая, что R133=R131=22КОм, и их отношение равно единице, то получить коэффициент передачи 0,038 возможно, изменив сопротивление R133 так, что
 Мом.
Мом.
То есть, последовательно сопротивлению R133 впаивается сопротивление, равное 2,6МОм─22Ком=2,58МОм, то есть, выбирая из номинального ряда сопротивлений, принимаем дополнительное сопротивление МЛТ в 2,7 Мом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.