22. Назначение основных элементов стенда.
23. Структурная схема и принцип действия регулятора.
24. Почему регулятор типа Р25 называют релейно-импульоным регулятором и при каких условиях его характеристика приближается к характеристике ПИ-регулятора непрерывного действия?
25. Как получается П-закон при применении регулятора Р25?
26. Что такое органы динамической настройки регулятора и как их можно проградуировать по переходным характеристикам?
27. Как устроен электрический исполнительный механизм? Его характеристики, уравнение.
28. Как передается управляющий сигнал от регулятора к исполнительному механизму?
1.3. Вэаимодейотвие регулирущего блека с исполнительным механизмом
Динамические свойства релейно-импульсного регулятора определяются двумя основными узлами - регулирующим блоком РБ и исполнительным механизмом (ИМ) постоянной скорости (рис. I).
Рис. I
Исполнительна механизм выполнен на базе асинхронного электродвигателя с редуктором и включается в работу с
помощью пускового устройства (ПУ).
Особенностью исполнительного механизма постоянной скорости является то,
что он рассчитан на определенное напряжение питания и не может управляться за
счет его изменения. При появлении достаточно мощного управляющего сигнала ![]() пусковое
устройство подает питающее напряжение на электродвигатель исполнительного
механизма. Последний производит перемещение
регулирующего органа
пусковое
устройство подает питающее напряжение на электродвигатель исполнительного
механизма. Последний производит перемещение
регулирующего органа ![]() с постоянной скоростью
с постоянной скоростью ![]() ;
не зависящей от значения управляющего сигнала
;
не зависящей от значения управляющего сигнала ![]() . таким
образом, по каналу
. таким
образом, по каналу ![]() рассматриваемый исполнительный механизм - нелинейное динамичеокое
звено.
рассматриваемый исполнительный механизм - нелинейное динамичеокое
звено.
Регулирующее воздействие ![]() в соответствии с заданным
законом регулирования (например, ПИ) получается с помощью импульсного способа
управления исполнительным механизмом. При этом его работа характеризуется чередованием кратковременных
включений (импульсов) длительностью
в соответствии с заданным
законом регулирования (например, ПИ) получается с помощью импульсного способа
управления исполнительным механизмом. При этом его работа характеризуется чередованием кратковременных
включений (импульсов) длительностью ![]() и отключений (пауз)
длительностью
и отключений (пауз)
длительностью ![]()
При каждом включении исполнительного
механизма регулирующий орган перемещается на величину ![]() , а во время пауз положение регулирующего органа остается неизменным
, а во время пауз положение регулирующего органа остается неизменным ![]() . Благодаря фильтрующим свойствам технологических объектов
прерывистое перемещение регулирующего органа воспринимаетя как плавное,
происходящее с некоторой усредненной скоростью
. Благодаря фильтрующим свойствам технологических объектов
прерывистое перемещение регулирующего органа воспринимаетя как плавное,
происходящее с некоторой усредненной скоростью ![]() ,
называемой скоростью регулирования [I]. Среднее
значение скорости регулирования характеризуется отношением перемещения регулирующего органа в течение одного импульса
,
называемой скоростью регулирования [I]. Среднее
значение скорости регулирования характеризуется отношением перемещения регулирующего органа в течение одного импульса ![]() к периоду следования импульсов
к периоду следования импульсов
![]() :
:

где ![]() - скважность управляющих импульсов.
- скважность управляющих импульсов.
Таким образом, средняя скорость регулирования ![]() пропорциональна скважности
пропорциональна скважности ![]() управляющих импульсов
управляющих импульсов ![]() (рис. 2).
(рис. 2).
Перемещение регулирующего органа ![]() при этом связано с изменением скважности
при этом связано с изменением скважности ![]() по интегральному
закону
по интегральному
закону

т.е. по каналу ![]() исполнительный механизм является линейным
исполнительный механизм является линейным 
интегрирующим звеном с передаточной функцией
Рис. 2
Изменяя скважность ![]() управляющих импульсов 2
в зависимости от сигнала рассогласования
управляющих импульсов 2
в зависимости от сигнала рассогласования![]() ', можно получить необходимое регулирующее
воздействие
', можно получить необходимое регулирующее
воздействие![]()
1.4. Формирование ПИ-закона регулирования
В качестве основного закона регулирования в релейно-импульсных
регуляторах с исполнительным механизмом постоянной скорости формируется ПИ-закон. Управляющие импульсы ![]() формируются в
регулирующем блоке, при этом их скважность
формируются в
регулирующем блоке, при этом их скважность![]() зависит
от сигнала рассогласования
зависит
от сигнала рассогласования
![]() в соответствиис передаточной
функцией ГЩ-звена
в соответствиис передаточной
функцией ГЩ-звена

где ![]() - передаточная функция
пропорционально-интегрального
- передаточная функция
пропорционально-интегрального
регулятора;

обеспечивающего закон регулирования:

Структурная схема регулирующего блока, формирующего необходимую последовательность импульсов Z(f), изображена на рис. 3:
Рис. З
Она содержит сумматор ![]() , трехпозиционный
релейный элемент РЭ (контактный или бесконтактный) с зоной нечувствительности
, трехпозиционный
релейный элемент РЭ (контактный или бесконтактный) с зоной нечувствительности ![]() и зоной возврата
и зоной возврата ![]() (рис. 4) и формирующую обратную
связь (ФОС) в виде апериодического эвена с
характеристикой (рис. 5). В современных релейно-импульсных регуляторах ФОС имеет разделенные цепи заряда и разряда,
характеризуемые постоянными времени заряда
(рис. 4) и формирующую обратную
связь (ФОС) в виде апериодического эвена с
характеристикой (рис. 5). В современных релейно-импульсных регуляторах ФОС имеет разделенные цепи заряда и разряда,
характеризуемые постоянными времени заряда ![]() и
разряда
и
разряда ![]() :
:

где
т.е. ФОС нелинейна. Как будет
показано далее, такое разделение цепей заряда
и разряда в ФОС приводит к обеспечению независимости органов настройки
параметров ![]() и
и ![]() в
ПИ-регуляторе.
в
ПИ-регуляторе.
При подаче на вход регулирующего
блока ступенчатого входного сигнала ![]() переходная характеристика регулятора имеет вид, показанный на рис. 6, В начальный момент времени
после подачи входного сигнала
переходная характеристика регулятора имеет вид, показанный на рис. 6, В начальный момент времени
после подачи входного сигнала ![]() срабатывает релейный элемент РЭ и подает ситная
срабатывает релейный элемент РЭ и подает ситная ![]() на вход звена обратной связи,
вследствие чего
на вход звена обратной связи,
вследствие чего![]() начинает возрастать, а сигнал
начинает возрастать, а сигнал ![]() на входе РЭ-уменьшится.
на входе РЭ-уменьшится.
В момент времени ![]() сигнал достигает
порога отключения
сигнал достигает
порога отключения![]() , релейный элемент
отключается, сигнал
, релейный элемент
отключается, сигнал ![]() на входе звена обратной
связи становится равным кулю, вследствие чего
на входе звена обратной
связи становится равным кулю, вследствие чего![]() начинает
убывать, а величина
начинает
убывать, а величина ![]() - возрастать.
- возрастать.
перемещать регулирующий орган по
ломаной линии![]() (см.рис.6).Эта линия ори
(см.рис.6).Эта линия ори
достаточно большой скорости изменения
оигнала обратной связии![]() достаточно малой
зоне возврата близка к кривой разгона идеального ПИ-регулятора, описываемой
выражением:
достаточно малой
зоне возврата близка к кривой разгона идеального ПИ-регулятора, описываемой
выражением:

1.5. Определение параметров настройки Пи-регулятора
Аппроксимировав переходную
характеристику релейно-импудьсного регулятора![]() соответствующей идеалиэироавнной кривой
соответствующей идеалиэироавнной кривой![]() (рис.
6) можно оценить его эквивалентные параметры
(рис.
6) можно оценить его эквивалентные параметры

 или
или
где ![]() - время удвоения реакции
ПИ-регулятора по сравнению с первоначальным
сигналом;
- время удвоения реакции
ПИ-регулятора по сравнению с первоначальным
сигналом; ![]() - тангенс угла наклона интегральной составляющей.
- тангенс угла наклона интегральной составляющей.
Формулы (9) и (10) следуют из уравнения (6).
Для определения связи между ![]() ,
, ![]() и параметрами обратной связи и
исполнительного механизма найдем значения
и параметрами обратной связи и
исполнительного механизма найдем значения ![]() и
и![]()
 i
i
где  —
окорость изменения сигнала
—
окорость изменения сигнала
обратной свяэк под действием![]() при включении
релейного элемента
при включении
релейного элемента

Длительность импульсов и пауз можно выразить следующим образом
 ,
, 
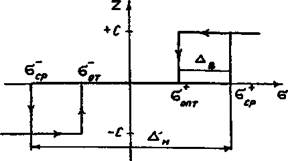
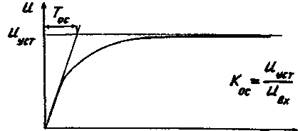
Рис. 4 Рис. 5
Когда сигнал![]() достигает порога
орабатывания РЭ (в момент
достигает порога
орабатывания РЭ (в момент ![]() ),
происходит повторное включение РЭ. Далее процесс характеризуется периодическими импульсами (кратковременными
включениями релейного элемента) длительностью
),
происходит повторное включение РЭ. Далее процесс характеризуется периодическими импульсами (кратковременными
включениями релейного элемента) длительностью ![]() , чередующимися с паузами (отключениями РЭ) длительностью
, чередующимися с паузами (отключениями РЭ) длительностью![]() . Сигнал
. Сигнал![]() на входе релейного элемента будет изменяться при
этом в пределах зоны возврата
на входе релейного элемента будет изменяться при
этом в пределах зоны возврата ![]() (от
(от
![]() до
до ![]() и
обратно), а сигнал
и
обратно), а сигнал![]() на входе эвена обратной
связи - в пределах от до и обратно, т.е.
на входе эвена обратной
связи - в пределах от до и обратно, т.е. ![]() будет
практически следовать
будет
практически следовать![]() за входным
за входным![]() сигналом (с погрешностью,
определяемой порогами срабатывания
сигналом (с погрешностью,
определяемой порогами срабатывания ![]() и
и ![]() РЭ).
РЭ).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.