Градуировка может быть выполнена по переходной характеристике регулятора при отключенном объекте (в разомкнутой АСР), как покавано на рис. 17.
Рис. 17
Как известно, при ступенчатом отклонении
регулируемой величины от задания![]() в идеальном
в идеальном
ПИ-регуляторе, действующем по уравнению:

За счет действия пропорциональной части вал ИМ сразу переместится
на величину![]() , а
затем проявится действие интегральной части, которая при
, а
затем проявится действие интегральной части, которая при![]() удвоит перемещение ИМ
удвоит перемещение ИМ![]() По
времени перемещения ИМ до
По
времени перемещения ИМ до![]() можно определить время изсдрома
можно определить время изсдрома![]() (рис. 17). В реальном
релейно-импульснсм регуляторе перемещения ИМ под действием пропорциональной
части происходят не мгновенно, а за некоторое время
(рис. 17). В реальном
релейно-импульснсм регуляторе перемещения ИМ под действием пропорциональной
части происходят не мгновенно, а за некоторое время ![]() до первой остановки ИМ после отклонения
от задания (до первого погасания сигнальной
лампы). По этой части переходной
характеристики определяется значение коэффициента передачи регулятора:
до первой остановки ИМ после отклонения
от задания (до первого погасания сигнальной
лампы). По этой части переходной
характеристики определяется значение коэффициента передачи регулятора:
Необходимо зафиксировать:
Рис. 18
без регулятора при том же возмуении ![]() выражается отношением первой амплитуды Af к изменению регулируемой величины в объекте.
выражается отношением первой амплитуды Af к изменению регулируемой величины в объекте.
 |
Это отношение показывает, во
сколько раз уменьшается амплитуда первого отклонения регулируемой
величины А в результате работа регулятора
по отношению к отклонению![]() без регулятора.
без регулятора.
Если переходные процесс значительно отличается от расчетного, необходимо скорректировать параметры настройки и снова записать переходный процесс. Таким образом уточняются расчетные параметры настройки.
2. ЛАБОРАТОРНАЯ РАБОТА
2.1. цель и задачи работы
Изучить динамические характеристики отдельных елементов автоматической сиотемы регулирования (АСР) и всей системы в целом.
Экспериментально определить динамические характеристики объекта и регулятора, преобрести определенные навыки и практический опыт.
Основаня цель работы - изучить технические оредотва автоматизации, освоить практические примеры градуировки органов динамической настройки регуляторов, ознакомиться с простейшими способами определения оптимальных параметров настройки регуляторов для получения желаемого качества регулирования и их уточнение по переходным процессом в замкнутой АСР.
Основные задачи реботы:
1) изучение лабораторного стенда. Ознакомиться о принципиальной схемой стенда регулирования температуры с регулятором типа Р25, назначением и взаимодействием отдельных ее элементов;
2) определение переходных характеристик объекта.
Снять переходные характеристики
объекта по каналу регулирующего воздействия
и построить график осредненной переходной функции объекта. Определить
значения![]() , необходимые для оценки параметров
настройки регулятора;
, необходимые для оценки параметров
настройки регулятора;
3)
изучение регулятора и органов
его настройки. Отградуировать органы настройки ![]() и
и ![]() при работе регулятора в ПИ-режиме и
при работе регулятора в ПИ-режиме и![]() -в П-режиме;
-в П-режиме;
4) настройка регулятора. Определить приближенные значения оптимальных параметров настройки регулятора на заданный переходный процесс и установить органы настройки регулятора в требуемое (расчетное) положение;
5) иооледование АСР по переходные процесоам. Зафиксировать процессы регулирования при ступенчатом возмущении по каналам регулирующего и управляющего воэдейотвий. По полученным переходным характеристикам АСР оценить качество процессов регулирования и дать заключение о необходимости коррекции установленных параметров кастройки. Определить скорректированные параметры настройки.
2.2. Описание лабораторного стенда
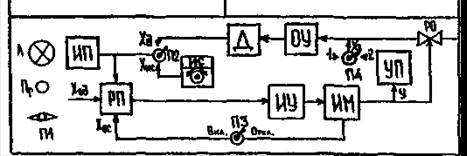
Лабораторный стенд представляет собой автоматическую систему регулирования (АСР) температуры с регулятором типа Р25, выпуокаемым Мооковским заводом тепловой автоматики (МЗТА). Схема лабораторного стенда показана на рио. 19. На рисунке приняты ояедующие обозначения:
ИП - измерительный регистрирующий прибор КС2;
РП - регулирующий прибор Р25;
ИУ - исполнительный усилитель (магнитный пускатель -РПУ-0-616);
ИМ - исполнительный механизм ЫЭО-4/63-0,63;
РО - регулирующий орган (автотрансформатораt ЛАТРа);
ОУ - объект управления (печь-сопротивление); Д - датчик (термоелектрический термометр);
УП - указатель положения исполнительного механизма;
Ш - выключатель сети питания стенда;
П2 - переключатель подключения к ИП сигнале от датчика или от вспомогательного источника сигнала;
ПЗ - переключатель, включающий жесткую обратную связь;
П4 - переключатель подачи возмущения на вход объекта управления;
ПР - предохранитель; Л - сигнальная лампа.
Объектом управления (ОУ) является электрическая печь-сопротивление,
температура в рабочем пространстве которой измеряется термопарой (Д),
работающей в комплекте с автоматическим потенциометром типа КСП 2, осуществляющим измерение и запись
выходной величины объекта. С помощью встроенного реостатного
преобразователя информация о регулируемой
величине![]() подается на регулирующий
прибор Р25 , где сравнивается с ее заданным значением
подается на регулирующий
прибор Р25 , где сравнивается с ее заданным значением ![]() Через исполнительный усилитель,
представляющий собой магнитный пускатель, выполненный на двух злектромагнитрых
реле, регулирующий прибор управляет электрическим исполнительный механизмом, имеющим постоянную скорооть. Исполнительный механизм перемещает регулирующий орган РО
(движок автотрансформатора ЛАТРа), что приводит к изменению тока,
протекающего через нагревательный элемент, и изменению температуры, являющейся
регулируемой величиной.
Через исполнительный усилитель,
представляющий собой магнитный пускатель, выполненный на двух злектромагнитрых
реле, регулирующий прибор управляет электрическим исполнительный механизмом, имеющим постоянную скорооть. Исполнительный механизм перемещает регулирующий орган РО
(движок автотрансформатора ЛАТРа), что приводит к изменению тока,
протекающего через нагревательный элемент, и изменению температуры, являющейся
регулируемой величиной.
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ РАБОТЫ P25.3.I
3.1. Задание I. Изучение лабораторного стенда и объекта регулирования
1. Ознакомиться со структурной и функциональной схемами стенда на базе регулятора Р25.
2. Ознакомиться со схемой ручного управления исполнительным механизмом (ИМ) и определить его характеристики.
3. Снять переходные характеристики объекта регулирования по каналу "регулирующее воздействие - температура"
4.по графику усредненной переходной характеристики определить![]()
Указания к выполнению задания I
3.I.I. После получения допуска к выполнению задания проверить, находится ли стенд в исходном состоянии. Измерительный прибор (ИП):
Питание - "Откл.", Диаграмма - "Откл." Регулирующий прибор (РП):
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.