Изучение процессов, происходящих в машине, должно начинаться с составления физической модели, адекватной этим процессам, т.е. пригодной для их описания. Модель машины представляет собой сочетание динамических моделей составных частей, каждая из которых выполняет свою функцию. Это
двигатель (источник энергии), механическая система (потребитель энергии), система управления движением. В свою очередь динамическая модель механической системы складывается из динамических моделей механизмов, её образующих. Простейшей динамической моделью механизма является механизм с жесткими звеньями. В классической теории механизмов и машин многие задачи динамики решаются на основе именно этой простейшей модели. В механизме с жесткими звеньями число степеней свободы совпадает с числом степеней подвижности. В рамках тем курсовых проектов, как правило, W = 1.
При проведении предварительных расчетов на стадии эскизного проектирования обычно используют модель с жесткими звеньями. С её помощью выбирают двигатель, оценивают в первом приближении инерционные нагрузки и реакции в кинематических парах. В последующей стадии технического проектирования модель усложняют за счет включения в неё упругодиссипативных элементов.
«Выбор динамической модели зависит от поставленной задачи и обычно носит многоступенчатый характер. Большую роль в этой, нередко эвристической, процедуре играет опыт и искусство исследователя» (И.И.Вульфсон, §6.1., в кн. «Механика машин»).
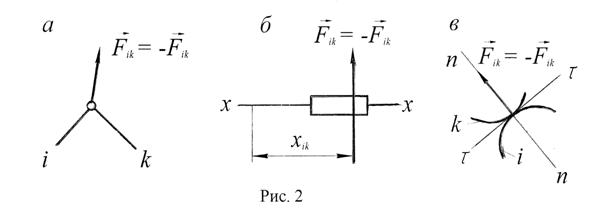
5.Реакции в кинематических парах Fik – усилия, с которым звено
i действует на звено к в точке их соприкосновения (![]() ) . Для плоской кинематической
цепи во вращательной одноподвижной кинематической паре (рис.2, а) известна
точка приложения реакции, но неизвестны величина и ее направление; в
поступательной одноподвижной паре известно направление (
) . Для плоской кинематической
цепи во вращательной одноподвижной кинематической паре (рис.2, а) известна
точка приложения реакции, но неизвестны величина и ее направление; в
поступательной одноподвижной паре известно направление (![]()
![]() хх), но неизвестны
величина и точка приложения (рис.2, б); в кинематической двухподвижной| паре
известны точки приложения и направление реакции, но неизвестна величина (рис.2,
в).
хх), но неизвестны
величина и точка приложения (рис.2, б); в кинематической двухподвижной| паре
известны точки приложения и направление реакции, но неизвестна величина (рис.2,
в).
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.