У цьому разі потрібно вирахувати корні чисельника і знаменника, поліноми розкласти на елементарні множники і далі розв’язувати задачу з виразом (1.77), як задачу з виразом (1.76). Але цей шлях ускладнює процес побудови частотних характеристик.
Для W(p) у вигляді (1.77) рекомендується наступні вирази для побудови АФХ, АЧХ, ФЧХ і ЛАЧХ:
- для побудови АФХ використовують


де
Задаючи ω і ураховуючи за умовами задачі числові значення
параметрів ![]() обчислюють по виразам (1.82) та
(1.83) відповідні значення
обчислюють по виразам (1.82) та
(1.83) відповідні значення![]() , записують їх у
таблицю і будують АФХ – W(jω);
, записують їх у
таблицю і будують АФХ – W(jω);
- для побудови АЧХ використовують


Задаючи ω обчислюють відповідні значення![]() ;
;
- для побудови ФЧХ використовують
Задаючи ω обчислюють відповідні значення ![]()
- для побудови ЛАЧХ використовують рекомендації [11] – c. 88-89.
Відповідно до [11] визначають відношення коефіцієнтів з більшими індексами до коефіцієнтів з меншими індексами
Якщо при записі передатної функції прийняти, що Т1 > Т2, то тоді будемо мати такі наближені рівняння
де ω1, ω2 – частоти сполуки інерційних ланок першого порядку.
Ураховуючи (1.87), при побудові ЛАЧХ для задачі з виразом (1.77) можна використати вираз (1.76), для якого

Метод, рекомендований в [11] для побудови ЛАЧХ по коефіцієнтам переданої функції, може бути поширений на загальний випадок, коли передатна функція розімкненої системи має вигляд:

Із (1.89) визначаються частоти сполуки інерційних ланок:
-
чисельника 
-
знаменника 
Нахил ЛАЧХ на частотах сполуки, які належать знаменнику,
дорівнює –![]() , а на частотах сполуки, які належать
чисельнику, дорівнює
, а на частотах сполуки, які належать
чисельнику, дорівнює![]() . Низькочастотна асимптота
проводиться під нахилом
. Низькочастотна асимптота
проводиться під нахилом ![]() через точку з
координатами
через точку з
координатами![]() ,
,
де ![]() – коефіцієнт
підсилення розімкненої системи
– коефіцієнт
підсилення розімкненої системи
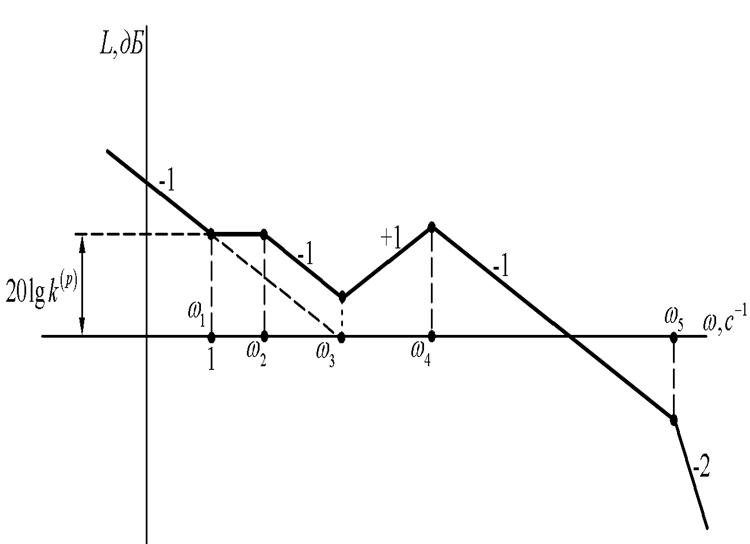
Рисунок 1.20. ЛАЧХ системи 1.5.2
1.5.2 Для двигуна постійного струму з незалежним
збудженням, коли вхідною координатою є напруга (U) на затискачах обмотки
якоря, а вихідною – швидкість двигуна (ω) побудувати АФХ, АЧХ, ФЧХ і
ЛАЧХ для такого варіанту:![]() . Визначити тип
ланки до якої його можна віднести.
. Визначити тип
ланки до якої його можна віднести.
1.5.3. Записати передатні функції розімкнених систем автоматичного керування за видом їх ЛАЧХ, що наведенні на рис.1.20. і рис.1.21.
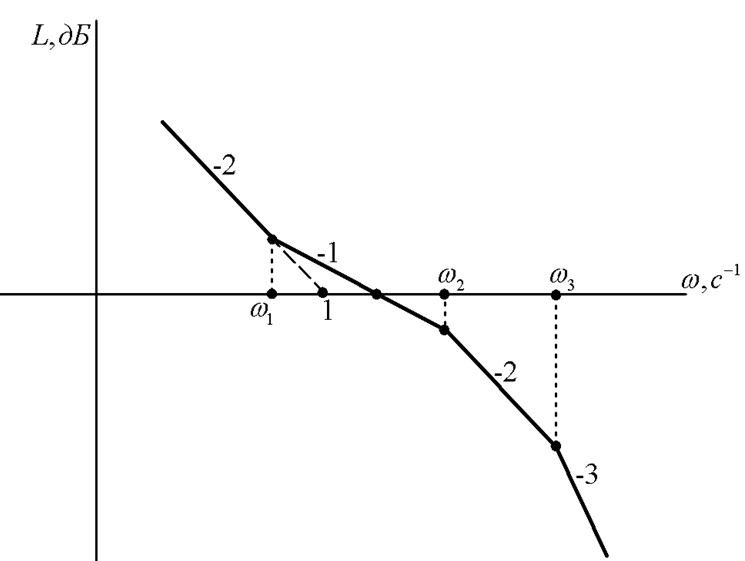
Рисунок 1.21. ‑ ЛАЧХ системи
1.5.4. Побудувати АФХ, АЧХ, ФЧХ, і ЛАЧХ розімкнених систем автоматичного керування з такими передатними функціями:
1.5.5. Побудувати ЛАЧХ і ЛФЧХ розімкненої системи, передатна функція якої має вигляд
1.6 Практичне заняття 6
Часові і частотні характеристики типових елементів (ланок) САК
Методичні вказівки
Під елементарною ланкою розуміють штучно виділену частину автоматичної системи, яка відповідає будь-якому алгоритму, наприклад, диференціальному рівнянню, порядок якого не більше двох.
Перехідні процеси різних за своїми фізичними принципами дії і конструкціями ланок визначаються подібними диференціальними рівняннями динаміки. З цієї точки зору, до одного типу ланок можна віднести механічну рухому масу і електричне активно-індуктивне коло [1]-с.60.
Якщо одна і та же ланка відповідає різним по своїй природі системам, то така елементарна ланка називається типовою.
Типові ланки – це “цеглини” динамічної споруди, яка називається системою автоматичного керування. Тому дуже важливо знати динамічні властивості та характеристики типових ланок, вміти швидко будувати їх часові і частотні характеристики, визначати ланки, за допомогою яких будуються регулятори (коректуючи пристрої) і за допомогою яких описуються об’єкти керування в автоматизованих електроприводах.
Основними динамічними характеристиками типових ланок є:
– часова характеристика x=f(t);
– перехідна функція h(t)=x(t), при ![]() =1(t);
=1(t);
–
функція ваги
(імпульсна перехідна функція) w(t) при ![]() = б(t).
= б(t).
Функція ваги є похідною від перехідної функції
![]()
По часовим характеристикам визначають прямі показники якості типової ланки.
Щоб визначити часову характеристику ланки потрібно розв’язати диференціальне рівняння ланки. Розв’язання диференціального рівняння типової ланки не є дуже складною задачею.
Але часові характеристики можна визначити також, використовуючи інші математичні моделі ланок і систем, а саме:
– передатну функцію ланки – W(p);
–
комплексну передатну
функцію ланки і її дійсну частотну характеристику -![]() .
.
Методика побудови часової характеристики по W(p) викладена
в [3]-с.17-24, а по ![]() - в [9] – с.200-206;
[11]-114-119.
- в [9] – с.200-206;
[11]-114-119.
Для оцінки динамічних і статичних властивостей типових ланок можна скористатись також наближеними методами, серед яких дуже поширеними є частотні.
У загальному випадку диференціальне рівняння типової ланки в операторній формі має вигляд
![]()
де Q(p) і R(p) – поліноми не вище другого порядку.
Поліном Q(p) показує, як швидко та точно реагує типова ланка на вхідну величину. Наявність похідних в Q(p) це спотворення, які вносяться ланкою в систему.
В свою чергу R(p) показує, на що реагує дана ланка і з яким коефіцієнтом передачі (підсилення) вхідна величина з’являється на виході ланки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.