Для дослідження систем автоматичного керування, в залежності від умови задачі, використовують для вихідної координати такі передатні
функції:
за завданням
за збуренням
Чи відповідні передатні функції для похибки:
Після цього записують вираз для вихідної координати
![]()
аналогічно для похибки
![]()
Вирази (1.27) і (1.28) – це диференціальні рівняння замкненої системи в операторній формі.
Для аналізу і синтезу замкнених систем автоматичного керування широко використовують також передатну функцію розімкненої системи
![]()
де ![]() – передатна
функція прямого ланцюга системи;
– передатна
функція прямого ланцюга системи;
![]() – передатна
функція зворотного ланцюга системи.
– передатна
функція зворотного ланцюга системи.
Тут і подальше:
![]() – вхідна величина (жадане діяння),
– вхідна величина (жадане діяння), ![]() –
вихідна величина,
–
вихідна величина,
![]() –
збурення,
–
збурення, ![]() – похибка.
– похибка.
Для вирішення задач цього підрозділу рекомендується використати матеріал: [1] – c. 71-80; [2] – c. 58-64; 75-86; [5] – c. 203-209; [9] – c. 49-53; а також конспект лекцій.
1.3.1 Записати передатну функцію для схеми, наведеної на рисун-
ку 1.6, використовуючи вираз (1.21)
Розв’язання:
Записуємо диференціальне рівняння (1.21) в операторній формі при нульових початкових умовах

Чи
![]()
З (1.31) одержуємо передатну функцію
Передатна функція записана в стандартній формі і складається з двох типових ланок:
- форсуючої з
![]()
- ланки другого порядку з
 ;
;
1.3.2 Одержати передатну функцію і скласти диференціальне рівняння ланки, схема якої наведена на рис.1.8
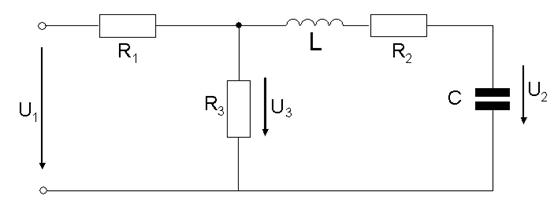
Рисунок 1.8 - Принципова схема електричної ланки
Розв’язання.
Передатна функція електричної ланки

де

![]() – операторні
опори.
– операторні
опори.
У відповідності з рис.1.8 операторні опори мають такі вирази:

Тоді, ураховуючи вирази (1.37)÷(1.40), маємо

Отже

де  .
.
По передатній функції записуємо диференціальне рівняння в зображеннях по Лапласу наступним чином
![]()
Чи
![]()
Формальна заміна символу p на символ ![]() дає запис диференціального рівняння в
оригіналах
дає запис диференціального рівняння в
оригіналах

1.3.3 Одержати передатну функцію і скласти диференціальне
рівняння ланки, схема якої наведена на рис.1.8, за умови, що напруга ![]() на котушці індуктивності
на котушці індуктивності ![]() , а не на конденсаторі С.
, а не на конденсаторі С.
1.3.4 Записати передатні функції та скласти по ним структурні схеми електродвигуна постійного струму незалежного збудження, використовуючи рівняння (1.5÷1.8) – форма ВВ, а також рівняння (1.15) – форма ЗС .
Визначити, якими типовими ланками він постає на структурних схемах.
Розв’язання.
В зображеннях по Лапласу рівняння (1.5) та (1.6) мають такий вигляд:
![]()
чи
![]()
чи
![]()
де 
Використовуючи рівняння (1.48) і (1.50), будуємо структурну схему. Але раніше знаходимо передатні функції електродвигуна, з яких буде складатися структурна схема.
 –
–
аперіодична ланка першого порядку;

де 
W2(p) – інтегруюча ідеальна ланка.
 – без інерційна
ланка. (1.53)
– без інерційна
ланка. (1.53)
Таким чином, на структурній схемі електродвигун постає трьома ланками: аперіодичною першого порядку, ідеальною інтегруючою і без інерційною. Структурна схема наведена на рис.1.9
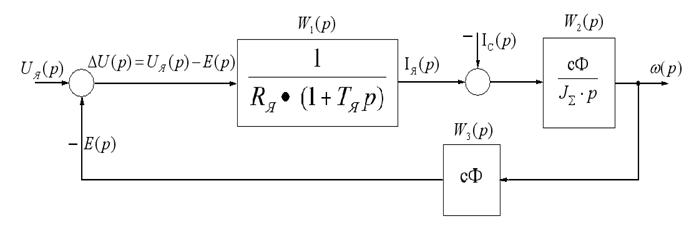
Рисунок 1.9 - Структурна схема електродвигуна постійного
струму незалежного збудження (форма ВВ)
В зображеннях по Лапласу система рівнянь (1.15) має вигляд:
Цій системі відповідає структурна схема, яка наведена на рисунку 1.10
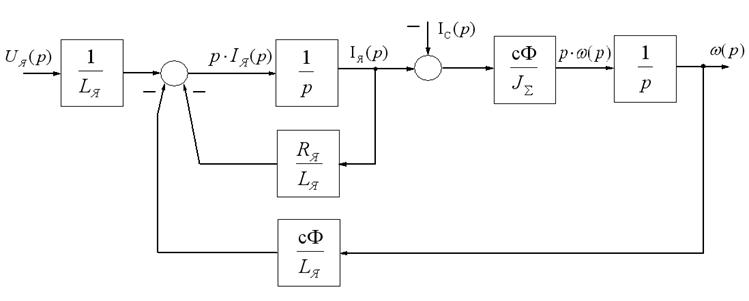
Рисунок 1.10 - Структурна схема електродвигуна постійного
струму незалежного збудження (форма ВВ)
1.3.5 Записати передатні функції та скласти по ним структурну
схему електродвигуна постійного струму незалежного збудження при керуванні
напругою якоря, коли ![]() ;
; ![]() ;
;
![]() (дивись задачу 1.2.2.) .
(дивись задачу 1.2.2.) .
Визначити, якими типовими ланками він постає на структурній
схемі. Де ![]() – кут повороту вала.
– кут повороту вала.
1.3.6 Записати передатні функції та скласти по ним
структурну схему електродвигуна постійного струму незалежного збудження при
керуванні напругою якоря, коли ![]() (дивись задачу
1.2.3). Де М – обертальний момент двигуна.
(дивись задачу
1.2.3). Де М – обертальний момент двигуна.
Визначити, якими типовими ланками він постає на структурній схемі.
1.3.7 Операційний підсилювач охоплено від’ємними зворотнім зв’язком ЗЗ. Записати передатну функцію, скласти диференціальне рівняння, а також визначити тип регулятора. Схеми підсилювачів наведені на рисунку 1.11 і рисунку 1.12
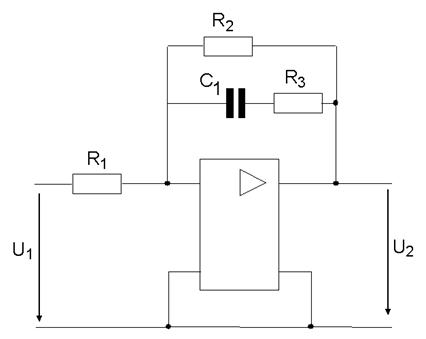
Рисунок 1.11 - Принципова схема підсилювача
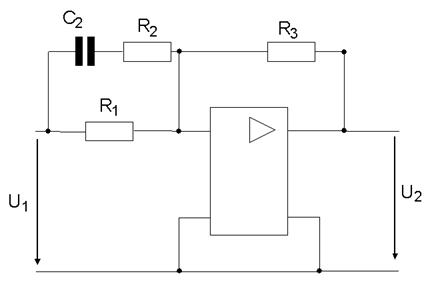
Рисунок 1.12 - Принципова схема підсилювача
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.