- Записываем векторное уравнение скорости точки С
![]() (1)
(1)
- Анализируем векторное уравнение
![]() (2)
(2)
![]()
VC - ? VC // X
- Строим на плане скоростей уравнение 1
- Находим истинное значение скорости
![]() (по правилу обозначение отрезка пишется
от вершины вектора)
(по правилу обозначение отрезка пишется
от вершины вектора)
![]()
-
Из
уровня (2) находим, что 
- Найдем скорость точки F
![]() (3)
(3)
![]()
![]() (4)
(4)
- Строим план скоростей точки F
Свойства плана скоростей (рис. 1. а).
1. Все скорости выходящие из полюса являются абсолютными скоростями исследования.
2. Вектора, не проходящие через Рr , являются относительно скоростными точками.
3. Скорости точек, лежащие в полюсе плана скоростей равны 0.
4. Т. подобия. Фигура, образованная в результате жесткого соединительного соединения концов векторов абсолютных скоростей подобна и повернута на 900 фигуре на плане положений.
(Скорость точки F находится из
подобия  ).
).
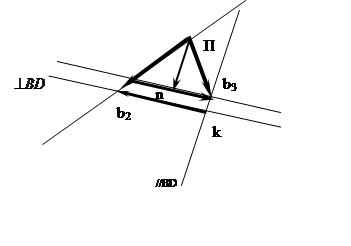
Построение плана ускорений (рис. 1. б).
1. Построить планы скоростей.
2. Находим ускорение точки В.
![]() (1)
(1)
![]()
![]()
![]() к
центру вращения.
к
центру вращения.
3. Выбираем полюс ускорений (π).
4. Откладываем b произвольной
длины вектор ![]() .
.
5. Находим ![]()
![]() в
сторону ε1.
в
сторону ε1.
6. Определяем масштабный коэффициент ускорения.

7. Находим отрезок, который будет изображать тангенциальное ускорение на плане ускорений.

8. Строим на плане ускорений bbn.
9. Соединив П и b, мы находим абсолютное ускорение точки В.
10. Определим истинное ускорение точки В.
![]()
11. Находим ускорение точки С.
![]() (2)
(2)
![]()
![]() к точке В
к точке В
12. Находим отрезок,
который будет изображать на плане ускорений ![]() .
.

13. Откладываем bn' на плане ускорений.
14. ![]()
![]() (3)
(3)
15. Из точки bn' проводим след
![]() .
.
16. Проводим след ускорения точки С через полюс П.
17. Находим истинное значение
![]()
![]() - вектор Сb
- вектор Сb
![]()
18. Находим угловое ускорение второго звена из (3)

19. Находим напр.
углового ускор. зв. 2., для чего вектор ![]() условно
переносим в точку С.
условно
переносим в точку С.
Свойства планов ускорений.
Полностью аналогичны свойствам планов скоростей. Единственное отличие состоит в том, что жесткая фигура на плане ускорений поворачивается на угол, отличный от 900.
Особенности кинематического анализа кулисных механизмов.
Кулисным называется механизм, у которого имеется подвижная направляющая.
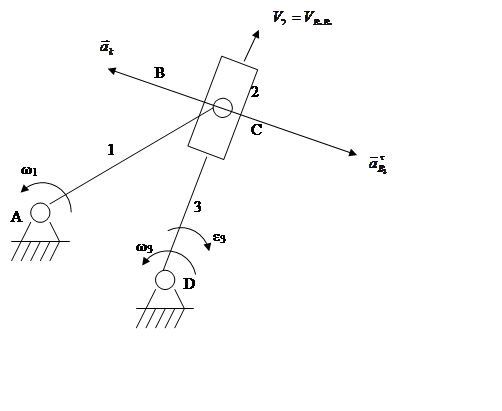
 |
1 – кривошип
2 – камень
3 – кулиса
Особенностью кулисных механизмов является то, что В принадлежит 3-м звеньям.
![]() кривошипу
кривошипу
![]() камню
камню
![]() кулисе
кулисе
Звено 2 совершает сложное движение, т. е. у него естьV- относительная и ω – переносная, таким образом, появляется дополнительное ускорение ак.
![]()
![]()
![]() - для плоских механизмов
- для плоских механизмов
Правило определения направления кариолиса.
1. Определим направление Vотн и ωпер
2. Если смотреть на
вектор переносной скорости (ω3), тогда поворачиваем вектор относительной
скорости (V2) угол 900
в сторону вращения ω3 получим ![]() .
.
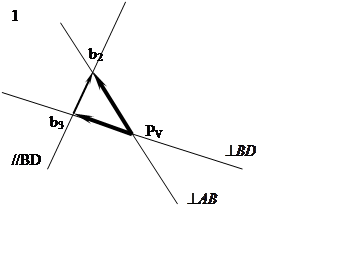
Постороение планов скоростей кулисного механизма.
1. Проводим структурный анализ.
2. Строим планы положения.
3. Строим планы скоростей.
3.1. Определяем скорость точки В1.
![]()
![]()
3.2. Выбираем полюс плана скоростей.
3.3. Из точки pV откл.
произвольной длины вектор скорости ![]() .
.
3.4. Определяем масштабный коэффициент

3.5. Определив скорость точки В3
![]() (1),
(1),
решим (1)
относительно ![]()
![]() (2)
(2)
![]()
![]()
![]()
анализируем (2).
3.6. Строим векторное ускорение (2) на плане скоростей.
3.7. Находим истинное значение скоростей.
![]()
![]()
3.8. Находим ω3.
![]()

3.9. Находим направление угловой скорости ω3.
4. Строим планы скоростей для других положений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.