Они имеют свое названия.
1. кривошип (круговое движение)
2. шатун (сложное движение)
3. ползун (возвратно-поступательное движение)
Механизм или машина может иметь одно или несколько входных и выходных звеньев. Механизм имеющий одно входящее и несколько выходящих называются диффиринцированным. Механизм имеющий несколько входящих и одно выходящих называется суммирующим механизмом.
В механизме рассматривают начальное звено – звено, с которого начинается исследование механизма, или которому приписывают обобщающую координату.
Звенья разделяют на ведомые и ведущие.
Ведущее звено – оживляет машину. Ведущим называется звено, для которого в данный момент времени сумма элементарных работ больше 0.
Ведомое звено – это звено, для которого в данный момент времени сумма элементарных работ меньше 0.
Ведущие и ведомые звенья при работе механизма могут взаимно превращаться в друг друга.
Пространство в котором существуют механизмы.
Евклидово пространство можно разделить на геометрическое, кинематическое и динамическое пространство.
Каждое кинематическое пространство характеризуется:
М – мерностью
П – подвижностью
N – нагруженность
М – число координатных осей характеризующие пространство.
 |
|||||
П=2;М=1 М=2 П=6;М=3
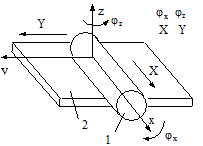
Плоскость – движение разрешено вдоль x, y и вокруг z.
Кинематические пары.
Кинематические пары – это конструктивное, подвижное объединение 2-х звеньев.
Поверхности, линии или точки по которым контактируют между собой звенья. Образующаяся пара называется элементами кинематической пары.
Кинематические пары разделяют на:
· низшие
· высшие
· с геометрическим замыканием
· с силовым замыканием
· открытые
· закрытые
А так же делятся на классы и подвижности.
Кинематические пары, элементы которых контактируют по линии или точке относят к высшим. Кинематические пары элементы которых контактируют по поверхностям относят к низшим. При проектировании машины лучше использовать низшие кинематические пары так как в них нагрузка распределяется по большим площадям, я значит меньше нагрузка, больше надежность, долговечность.
Если замыкание звена в кинематической паре осуществляется за счет определенным образом подобранных геометрических элементов пары, то такие пары называются с геометрическим замыканием.
Если элементы кинематических пар замыкаются силовым образом (вес, пружина), то такие пары называются парами с силовым замыканием.
Пары с геометрическим замыканием относятся к закрытым парам, а с силовым замыканием – к открытым.
При объединении звеньев в кинематические пары они лишаются былой подвижности или былой степени свободы (Н), подвижности (W).
W=H=П-S – по подвижности
П – подвижность
S – число связей
S=П-W – на классы.
|
№ п/п |
Рисунок |
Название пары |
Условное обозначение |
Подвижность пары |
Высш. Низш. |
Геомет. Силов. |
|
1 |
|
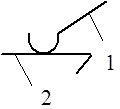
Вращательная |
|
1 |
Н |
Г |
|
2 |
|
Поступательная |
|
1 |
Н |
Г |
|
|
|
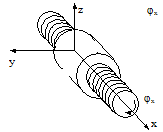
Винтовая |
1 |
Н |
Г |
|
|
4 |
|
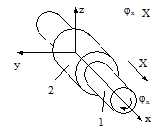
Цилиндри- ческая |
|
2 |
Н |
Г |
|
5 |
|
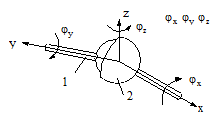
Сферическая |
|
3 |
Н |
Г С |
|
6 |
|
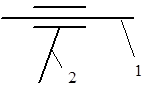
Цилиндр- плоскость |
|
4 |
В |
С |
|
7 |
|
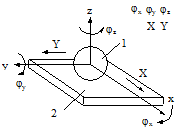
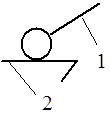
Щар-плоскость |
|
5 |
В |
С |
Замена высших кинематических пар низшими.
В настоящее время наиболее полно разработаны методы кинематических и динамических исследований механизмов с низшими парами. В связи с этим механизмы с высшими парами преобразовать в механизмы с низшими парами.
Алгоритм замены высших пар в низшие:
1. Проводим общую нормаль в точке контакта звеньев.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 3
3