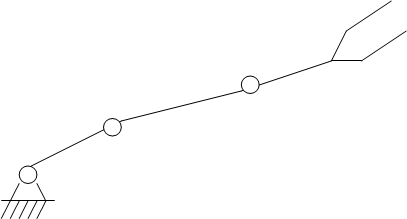
2. Находим радиусы кривизны в месте контакта.
3. Если радиусы кривизны конечны или равны 0, то в их центре помещаем вращательные кинематические пары. Если радиусы = ¥, то помещаем поступательные кинематические пары.
4. Последовательно соединяем все кинематические пары звеньями.
 |
N ρ 1 B N
ρ 2
A C
Заменяющий механизм полностью эквивалентен заменяющему только в данный момент времени.
Для другого положения механизма структура замененного механизма остается неизменной, а длины звеньев изменят свои размеры.
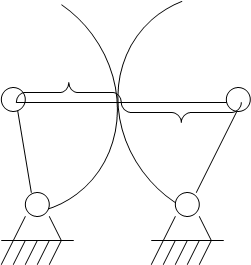
Пример:
 N ρ2 = ∞
N ρ2 = ∞
B
ρ1 2 C
A
1
N
Кинематические цепи.
Кинематические цепи – это объединение с помощью кинематических пар 2-х или более звеньев.
Кинематические цепи разделяют на:
· простые
· сложные
· замкнутые
· незамкнутые
· плоские
· пространственные
Если кинематическая цепь содержит только простые звенья, то она называется простой.
 |
ПРОСТАЯ
 |
СЛОЖНАЯ
 |
НЕЗАМКНУТАЯ
Кинематическая цепь звенья которой движутся в одной плоскости называются плоскими.
Кинематические соединения.
Кинематические пары в машинах практически не применяются, так как они имеют малую надежность, низкий КПД и т. д.
Простая кинематическая цепь, которая выполняет функцию кинематических пар называется кинематическим соединением.
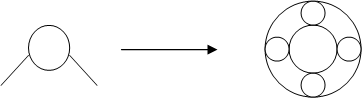
Подшипник качения
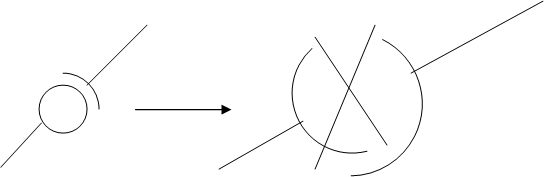
Шарнир Гука
Механизм можно рассматривать как частный случай кинематической цепи, у которой как минимум одно звено обращено в стойку, а движение остальных звеньев определено заданным движением входных звеньев.
Механизм, имеющий несколько входных и одно выходное звено называется суммирующим, а имеющий одно входное и несколько выходных – дифференцирующим.
По назначению механизмы разделяют на:
- направляющий механизм – механизм, у которого траектория определенной точки звена, образует кинематические пары только с подвижными звеньями, совпадает с заданной кривой;
- передаточный механизм – устройство, предназначенное для воспроизведения заданной функциональной зависимости между перемещениями входного и выходного звеньев.
Механизм, звенья которого образуют только низшие кинематические пары называется шарнирно – рычажным (пример: шарнирный четырехзвенник).
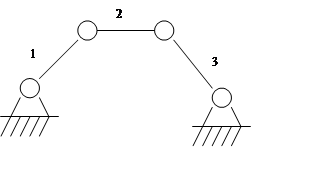
Шарнирный четырехзвенник:
1 – кривошип;
2 – шатун;
3 - коромысло.
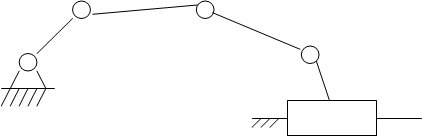
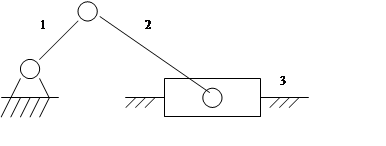 Кривошипно-ползунный механизм:
Кривошипно-ползунный механизм:
1 – кривошип;
2 – шатун;
3 – ползун.
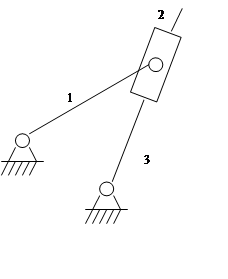
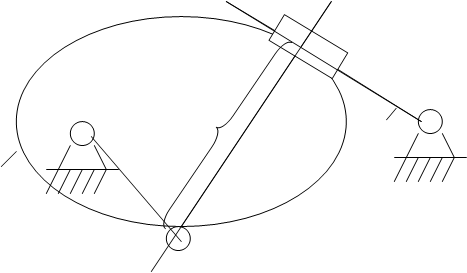
Кулисный механизм:
1 – кривошип:
2 – камень;
3 – кулиса.
Широкое применение в технике получили кулачковые механизмы, так как при их помощи наиболее просто можно получить практически любое движение ведомого звена по заданному закону.
Там, где необходимо преобразовать вращательное движение во взаимозависимое поступательное и наоборот обычно применяются винтовые механизмы.
 1 – винт;
1 – винт;
2 – гайка.
Клиновые механизмы применяются в различных видах зажимных устройств и приспособлений, в которых требуется создать большое усилие на выходе при ограниченных силах, действующих на входе при ограниченных силах, действующих на входе.
Механизмы, в которых передача движения между соприкасающимися телами осуществляется за счет сил трения, называются фрикционными.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.