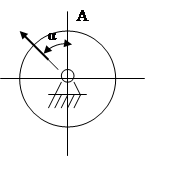
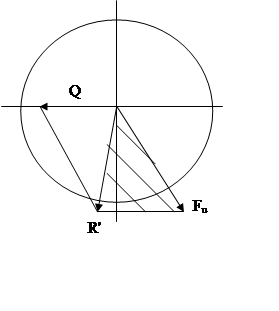
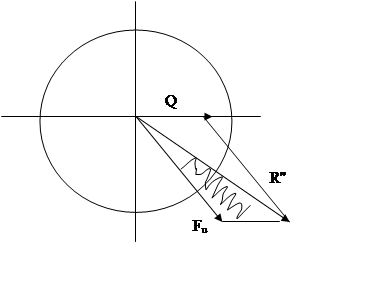
6. Найдем
отрезки ![]()
![]() . Для этого построим
повернутый на 900 план скоростей в точке О.
. Для этого построим
повернутый на 900 план скоростей в точке О.
![]()
![]()
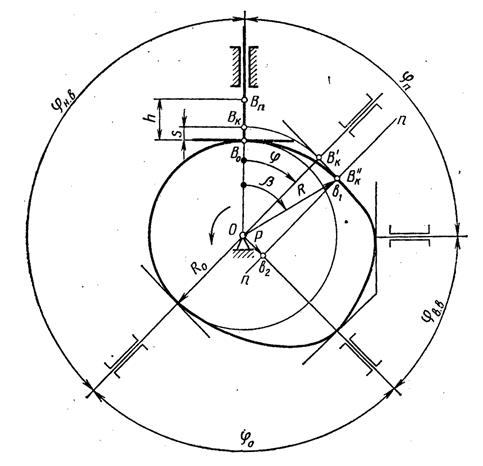
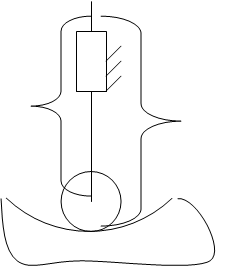
Чтобы построить профиль кулачка, необходимо от центра толкателя откл. величину аналога скорости (следовательно, диаметр тарелки толкателя, должен быть равен двойной величине max аналога скорости).
![]()
![]()
Выбор радиуса ролика.
 |
 |
||
![]()
![]()
 |
![]()
![]()
![]()
![]()
Если не проходит по этим параметрам нужно увеличивать R0.
Если ![]() достаточно
большая величина, то следует уменьшить r.
достаточно
большая величина, то следует уменьшить r.
Уравновешивание звеньев и машин.
Звенья машины в процессе работы движутся с различным ускорением а, следовательно, на них действуют силы инерции.
Эти силы инерции вызывают дополнительные реакции в кинематических парах, опорах фундамента. Эти реакции называются дин-ными реакциями, они приводят к вибрациям и шумам.
1. Уравнение вращающихся деталей.
2. Уравнение машины на фундаментах.
3. Защита оператора от воздействия вибрации.
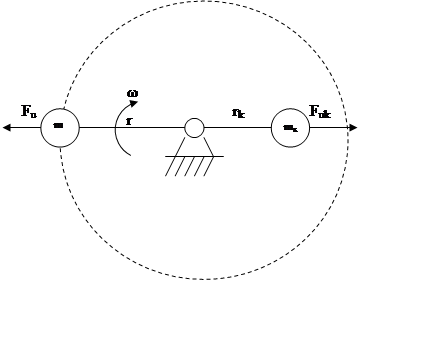
Уравновешивание вращающихся деталей (роторов).
![]() вызывает дополнительные динамические
реакции и моменты инерции.
вызывает дополнительные динамические
реакции и моменты инерции.
Мерой
неуравновешенности системы является дисбаланс ![]()
![]()
Для того, чтобы дет. была уравновешена, необходимо:
![]() (1)
(1)
![]() (2)
(2)
Если уравновешивание производится только по первому уравнению, то говорят о статистическом уравновешивании или статистической балансировке деталей.
Если уравновешивание производится по двум уравнениям, то говорят о полном или динамическом уравновешивании вращающихся деталей.
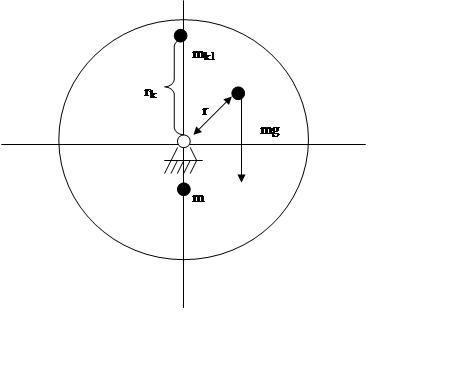
Статистическое уравновешивание роторов.

Уравновешивание детали производится с помощью установки дополнительных масс (изъятия масс).
 Задача
статистического равновесия обычно бывает статистически неопределенной, так как
не известны ни m, ни r, на
котором они находятся.
Задача
статистического равновесия обычно бывает статистически неопределенной, так как
не известны ни m, ни r, на
котором они находятся.
Наиболее просто задача решается
На практике статистическое уравновешивание детали проводят расчетным путем, и окончательную балансировку проводят экспериментальным путем.
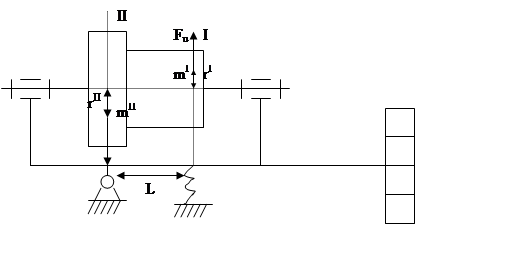
Полное или динамическое уравновешивание вращающихся масс.
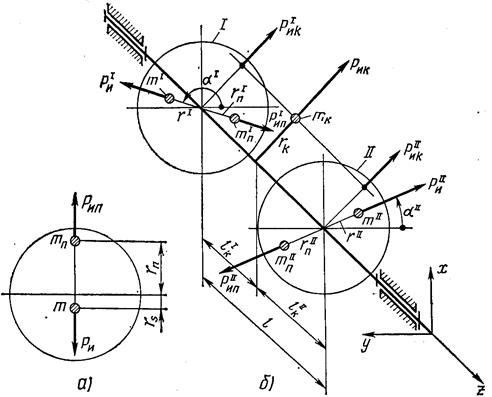
Покажем, что любую вращающуюся деталь можно ур-ти с помощью установки корректирующих масс в двух произвольно выбранных плоскостях.
С помощью
правил теоретической механики разнесем ![]() по
плоскостям.
по
плоскостям.
Найдем силу инерции, действующей на I-ую плоскость.
![]()
Аналогично
![]()
Для того, чтобы установить равновесие, нужно установить корректирующие массы.

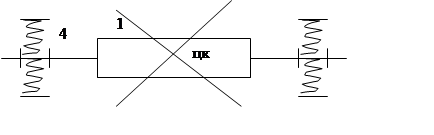
Балансировочные станки.
Принцип работы основан на измерении вибраций (колебаний) вращающихся деталей.
Известно, что амплитуда колебаний при резонансе =возбуждающей силе.
![]()
Балансировка выполняется по двум схемам.
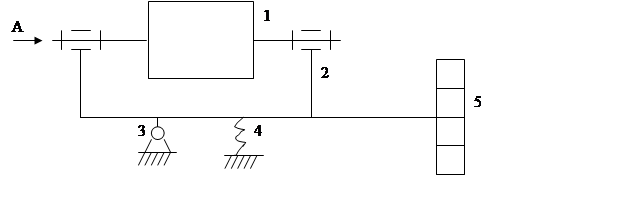
1 – ротор
2 – рама
3 – неподвижная опора
4 – подвижная опора
5 – измеряющее устройство
![]() , так как
, так как ![]() -
периодична, то под ее воздействием станок начинает колебаться, результат этого
колебания и снимем с измеряющего устройства.
-
периодична, то под ее воздействием станок начинает колебаться, результат этого
колебания и снимем с измеряющего устройства.
![]() приведет к качанию
приведет к качанию
Динамическое уравновешивание роторов на станках Шитикова.
Алгоритм балансировки деталей.
1.  Устанавливаем в
станок балансированную деталь раскр. деталь до угловой скорости ω, переводим
станок в режим выбега. При рез-се фиксируем амплитуду колебаний.
Устанавливаем в
станок балансированную деталь раскр. деталь до угловой скорости ω, переводим
станок в режим выбега. При рез-се фиксируем амплитуду колебаний.
![]()
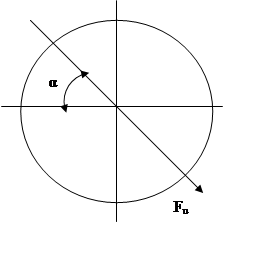
2. В
координатную плоскость I установим ![]() на производную g
на производную g ![]() , она вызовет
дополнительную силу.
, она вызовет
дополнительную силу.
![]()
![]() вызовет колебания с амплитудой
вызовет колебания с амплитудой ![]() (повт. 1 и фиксир. А2)
(повт. 1 и фиксир. А2)
3.  Массу
Массу ![]() размещаем под углом 1800 на том
же
размещаем под углом 1800 на том
же ![]() и раскр. деталь фиксируем А3.
и раскр. деталь фиксируем А3.
4. Совместим
между собой заштрихованную ![]() .
.
![]()
![]()
![]()

![]()
![]()
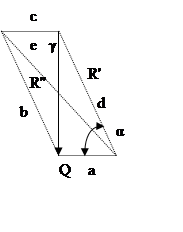
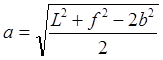
Из т. косинусов
имеем ![]()
![]()
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.