В соответствии с законом сохранения энергии сумма мощностей всех сил включая силы инерции в любой момент времени равна нулю.
ΣРi = 0 (1)
ΣMIpv = 0 (2)
Раскроем 2 для исследуемого механизма для чего строим предварительно перевернутый на 90˚ план скоростей
 F1``
F1``
Pv
F2`` h2`
F2
b
F1` S2 Fпс
с
Раскладываем моменты М1 и М2 на пары сил.
Раскроем (2)
- Fпс * hпс – F2` * h2` + F2 * h2 + F1` * h1` - F2`` * h2`` = 0
F1` = (Fпc * hпс + F2` * h2` - F2 * h2 + F2`` * h2``) / h1`
M1 = F1` h1` → ω1 = const
M1 = F1`h1` + J1ε1 → ω1 = var3
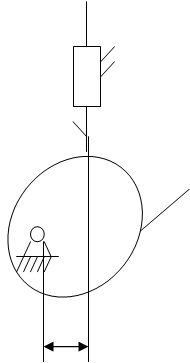
Синтез кулачковых механизмов.
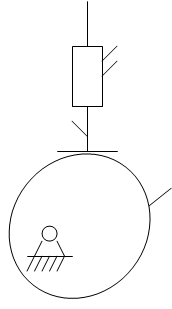
С
2
В
1
А А – вращающаяся низшая кинематическая пара.
В – высшая кинематическая пара
1 – кулачок
2 – выходное звено
Звено 2 называют толкателем, если оно совершает возвратно-поступательное движение или коромыслом, если совершает кол-ое движение.
Очень часто для замены трения скольжения, трения качения между кулачком и выходным звеном помещают ролик (3), который снабжает механизм дополнительной степенью свободы, но очень сильно увеличивает габариты кулачкового механизма.
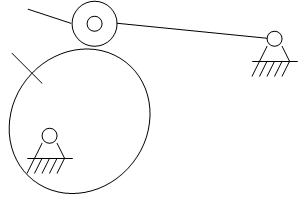 3
3
1
В
А
 3 m 2
3 m 2
1
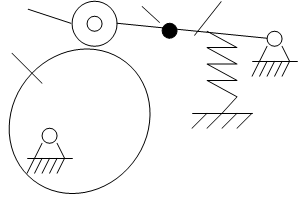
Для того чтобы выходное звено все время соприкасалось с кулачком используют механизм с силовым или геометрическим замыканием звеньев.
Пример силового замыкания
Классификация.
1. Кулачки классифицируют по пр-ам в которых они существуют.
2. По виду движения:
· с вращающимся кулачком
· с качающимся
· возвратно-поступательным
3. По виду движения выходного звена:
· возвратно-поступательным
· кач-ым
· сложным
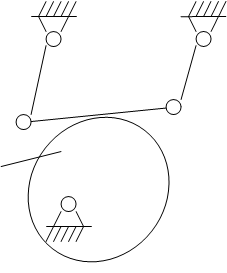
В
1
А
4. По виду замыкания кулачковые механизмы бывают:
· с силовым
· с геометрическим
5.  По расположению оси кулачка и толкателя
По расположению оси кулачка и толкателя
· L > 0
· L = 0
· L < 0
2
1
L
L – эксцентрик
6. 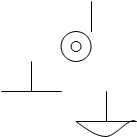 По конструкции толкателя
По конструкции толкателя
· с острым толкателем
· с роликом
· с плоским
· с выпуклым
Диаграмма движения кулачкового механизма.
Диаграмма движения кулачкового механизма это графическое изображение з-на движения выходного звена.
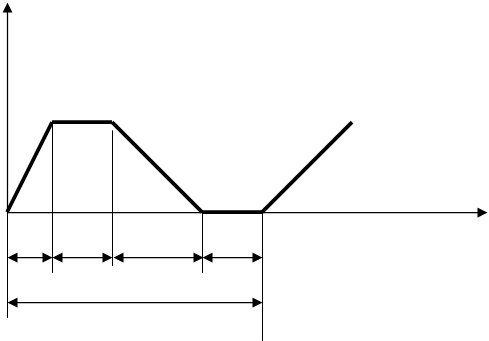 S ψ
S ψ
φ; (х)
φn φbb φo φhb
S – закон движения толкателя
Ψ – закон движения коромысла
φn – угол подъема выходного звена
φbb – угол верхнего выстоя
φo – угол опускания
φhb – угол нижнего выстоя.
Этапы синтеза кулачкового механизма.
Он обычно проводится в два этапа:
1. Определяются основные геометрические размеры механизма
R0 – min радиус центрового профиля кулачка
L – эксцентриситет
r – радиус ролика
l – длина коромысла.
2. Определяется профиль кулачкового механизма.
Определение R0 и L для кулисных механизмов с толкателем и R0 и L1 в кулисных механизмах с коромыслом.
Для определения
основных размеров кулачка должна быть задана ![]() или
или ![]() .
.
Для определения
R0 и L поступим
следующим образом ![]() в одном масштабе
в одном масштабе ![]() строят график
строят график ![]() ; координатные оси:
; координатные оси:
****************
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.