Если при
подъеме кулачка угол давления является острым направим оси так, следовательно
для каждой точки прямой справедливо равенство, которое мы вывели для θ.![]()
K0min можно уменьшить, если ввести L.
Определение размеров кулисного механизма с коромыслом
************
Откладываем от траектории ВВn значение аналога скорости в соответствии напр., причем если кулачок и коромысло на фазе подъема, вращающегося в разные стороны, то аналоги соответствуют положениям откл. от траектории ВВn влево.
Затем находим угол α.
![]()
![]()
А теперь для соответствующих точек откл. эти углы.
R0 и L0 берется max из всех заштрихованных областей.
Определение радиуса центрового профиля кулисного механизма из условной выпуклости кулачка.
Когда требуется min габариты, толкатель или коромысло выполняют плоскими.
Условие
выпуклости: ![]()
****************
Для определения R0 строим заменяющий механизм.
Найдем ускорение ак.
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
Построение профиля кулачкового механизма с толкателем и роликом.
Пусть необходимо синтезировать кулачковый механизм, если дано: R0, L, r, S=f(φ)
1. Из точки О радиусом R0 проводим окружность, затем из этой же точки проводим окружность радиусом L. Там, где L – окружность пересекает гор-ую прямую ставим С0, проводим в точку С0 касательную.
2. Точка пересечения большой окружности и касательной называется В0, в точку В0 риуем ролик радиусом r.
3. Из точки О проводим окружность радиусом R (R=R0 -r)/
4. Рисуем толкатель.
5. Наносим на толкатель диаграмму движения.
6. Для построения профиля кулачка используем метод обращ. движ. Для чего всем звеньям кулачка сообщаем скорость – ω1. Графики – это выражается в том, что к ОС0 под углом φ проводят линию.
7. На окружности L находим точку С1. Проводим касательную в точку С1.
8. Из точки О радиусом ОВ1 проводим дугу до пересечения с той касательной, которую получили в п.7, точку назовем В1.
9. Из точки В1 проводим окружность радиусом r, т.е. рисуем ролик.
10. Рисуем толкатель.
11. Соединяем плавной линией точки В0 и В1.
12. Проводим касательную к ролику.
13. От линии ОС1 откладываем угол φ и продолжаем построение центрового и рабочего профилей кулачка.
Для станочного производства кулачка необходимо иметь координаты всех точек профиля.
![]() -
радиус нижнего выстоя
-
радиус нижнего выстоя
![]()
Определим ![]() из
из
![]()

![]()
![]() - из
- из ![]()
![]()
![]()
![]()
![]() -
зависит от L.
-
зависит от L.
Из ![]() можно
записать, что
можно
записать, что

Из ![]() :
: 
На практике для того, чтобы не рассчитывать координаты работы профиля, режимный инструмент берут равный по диаметру ролику. Если это по каким-либо причинам не удастся, то тогда через обычные геометрические данные выводим координаты рабочего профиля.
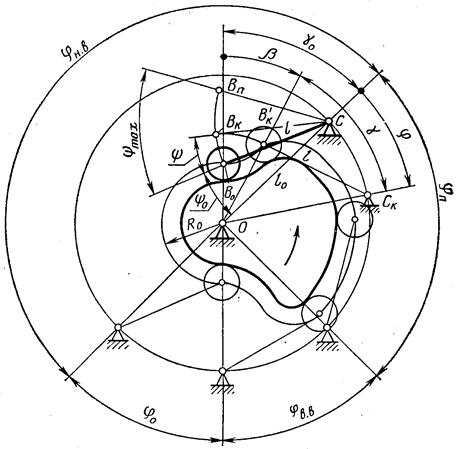
Синтез профиля кулачкового механизма с коромыслом.
Дано: R0, L- длина коромысла, L1 – растяжка между опорами кулачка и коромысла и ψ=f(φ).
1. Рисуем стойку. Проводим основания.
2. Рисуем окружности радиусами R 0 и L1.
3. Точки пересечения окружности R 0 и вертикали В0.
4. В точке В0 рисуем ролик.
5. Из точки О рисуем окружность радиуса R.
6. Из точки В0 рисуем дугу радиусом L до пересечения ее с окружностью L1 в точке С0 (место расположения стойки коромысла)
7. Используем метод обращенного движения.
8. Рисуем траекторию коромысла.
9. От линии ОС0 под углом φ проводим линию ОС1.
10. Радиусом ОВ1(i) проводим дугу окружности.
11. Из точки С1
радиусом L проводим дугу до пересечения с
предыдущей дугой в точке![]() .
.
12. Соединяем плавной линией В0 и В1(i) и точку касания.
13. Проводим под углом φ к ОС1 линию ОС2 и т.д.
14. В
результате последнего соединения точек![]() получим
центровой и рабочий профиль кулачка.
получим
центровой и рабочий профиль кулачка.
Для определения координат используется теорема сос-ов.
Из ![]()
![]()
![]()
![]()
![]()
Построение профиля кулачкового механизма с плоским толкателем.
Дано: R = R0, S = f(φ).
1. Рисуем стойку, основание, окружность радиусом R0.
2. Рисуем толкатель, траекторию движения.
3. Используем метод обращенного движения.
4. Радиусом
ОВ1(i) пр-им дугу до пересечения
с прямой, таким образом, находим точку![]() .
.
5. Профиль проводится по касательной к толкателю.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.