Подавление возмущений нагрузки имеет первостепенно значение при управлении объектом. Возмущения могу
|
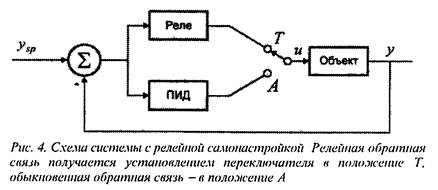
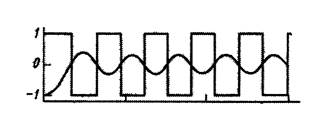
3.3. Реле иная обрат пая связь Релейная обратная связь - мощный метод возмущения динамической системы и определения ее полезных характеристик. Основная идея заключается в том, что многие системы с релейной обратной связью обладают устойчивыми предельными циклами. Частота и амплитуда предельного цикла определяются характеристиками системы и позволяют лучше понять ее свойства. Рассмотрим замкнутую систему с релейной обратной связью, представленную на рис. 4. Ее типичное поведение иллюстрирует рис. 5, на котором изображены графики входного и выходного сигнала. Отметим, что предельный цикл с формой выходного сигнала, близкой к синусоиде, устанавливается в системе очень быстро. Выход и вход объекта находятся в противофазе. Эксперимент с релейной обратной связью, таким образом, автоматически дает колебания с частотой (Ощц. Пусть амплитуда выходного сигнала объекта а, амплитуда релейного сигнала d. Методом гармонического баланса можно найти коэффициент усиления объекта при Ыщц. Он равен /Сщд = тса/4</. Это следует также и из анализа с помощью описывающей функции, поскольку описывающая функция идеального реле - отрицательная вещественная полуось [15]. |
|
|
|
Необходимые условия существования предельного цикла при релейной обратной связи были сформулированы Цыпки-ным [136] и Остремом [7]. Введение релейной обратной связи в линейную систему способно привести к весьма сложному поведению последней. Система может обладать предельными циклами со многими переключениями за период, иметь множество предельных циклов; могут наблюдаться также предельные циклы с дрожанием на части периода или даже хаотическое движение. Для типичных передаточных функций, встречающихся в задачах управления объектами, часто имеется единственный устойчивый предельный цикл. Приведенные в работе [7] результаты позволяют исследовать, что произойдет с конкретной передаточной функцией G(s). Один из наиболее простых, но интересных случаев - двойной интегратор, дающий бесконечно много предельных циклов, зависящих от начальных условий. Полного описания всех линейных систем, обладающих единственным устойчивым предельным циклом, до сих пор, однако, не существует. Автоматическую настройку ПИД регулятора сейчас выполняют следующим образом. Объект сперва замыкают релейной обратной связью. После получения устойчивого |
|
|
|
Рис. 5. Входной и иы\м)1Ю1'1 сигналы системы, июбриженпой ни рис. 4, с передаточной функцией, шдиииемой соотношением G(xi = = 3/(1 + 5s) (.1 + 1)'. По оси абсцисс отложено «ремя, по оси opi)u-чит -упраяляющий сигнал и выход объекта |
воздействовать на систему множеством различных путей. Для целей спецификации удобно будет предположить, что они приложены ко входу объекта. Это обеспечивает возбуждение системы возмущением. Кроме того, спецификацию можно проконтролировать. Типичные характеристики ошибки -максимальная ошибка, время достижения максимума, время установления, коэффициент затухания, интегральная ошибка и абсолютная интегральная ошибка.
Слежение за уставкой обычно имеет меньшее значение при управлении технологическими процессами, чем подавление возмущений нагрузки, поскольку изменение уставки -достаточно редкое событие [124, 125]. Более того, реакцию на изменения уставки можно настраивать независимо от возмущений нагрузки, используя структуру с двумя степенями свободы. Спецификации могут включать требования относительно времени нарастания, времени установления, коэффициента затухания, перерегулирования и статической неравномерности. *
Чувствительность к погрешностям моделирования можно выразить через максимум функции чувствительности М,. Отметим, что величина \1М^ — это наименьшее расстояние между годографом Найквиста и критическойточкой. Другими относящимися сюда характеристиками являются запас по усилению и запас по фазе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.