Высокочастотный измерительный шум попадает в систему по обратной связи. Необходимо обеспечить не слишком большое значение коэффициента усиления регулятора на высоких частотах, чтобы измерительный шум не приводил к чрезмерным управляющим воздействиям. Этого можно достичь, наложив ограничение на высокочастотный коэффициент усиления регулятора.
Приведенные спецификации охватывают ключевые моменты для одиночных контуров. Основанные на них процедуры конструирования ПИД регуляторов даны в работах [10, 1 10, 1 1 Ц.
3.2. Методы, основанные на характеристиках
Наиболее простые методы конструирования основаны на нескольких динамических характеристиках объекта, которые легко получить экспериментально. Типичные характеристики во временной области - статический коэффициент усиления к.р, доминирующая постоянная времени Ги доминирующее время запаздывания L, являющиеся параметрами передаточной функции объекта
Типичные характеристики в частотной области-статический коэффициент усиления Кр, предельный коэффициент усиления Кр = l//(i8() и предельный период Т„ = 2и/(«)щп.
Схемы Зиглера-Николса - один из наиболее распространенных методов настройки — основаны на использовании лишь двух параметров: L и а = К„1УТдпя метода отклика на ступенчатое воздействие и К„ и Т„ для частотных методов [148]. Метод Зиглера—Николса был разработан, чтобы дать относительное затухание {, -- 0,2, которое слишком мало. Оказалось также, что два параметра не несут достаточной информации для достижения хорошей настройки. Существенно лучшие правила настройки можно получить, используя дополнительный параметр. В качестве него можно выбрать нормализованное время запаздывания •с = L/(L + Т), или отношение коэффициентов усиления к = \/К,К„ = k^Kp [10, 1 1].
|
|
|
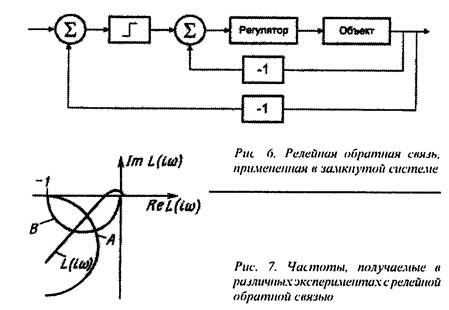
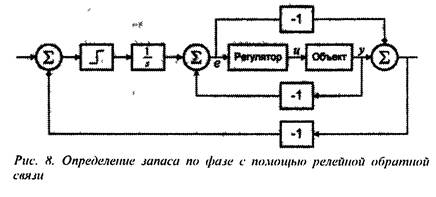
Введя интегратор последовательно с реле (см. рис. 6) и применив анализ с помощью описывающей функции, можно определить, что колебания будут совершаться с такой частотой, при какой argT(¹i) = -71/2. Данное условие имеет изящную интерпретацию на диаграмме Найквиста. Это просто полуокружность с диаметром (-1, 0) (рис. 7). Знание точек пересечения годографа Найквиста передаточной функции контура с окружностью В и отрицательной вещественной полуосью дает полезную информацию о поведении передаточной функции контура в области, критичной для многих свойств замкнутой системы. Измерение запасов по коэффициенту усиления и фазе Релейную обратную связь можно использовать также для непосредственного измерения запасов по усилению и фазе замкнутой системы. Эксперимент с релейной обратной связью в замкнутой системе, изображенной на рис. 6, позволяет найти точку, в которой годограф Найквиста передаточной функции контура пересекает отрицательную вещественную полуось (см. рис. 7). Если пересечение происходит при L(iw) = -т, запас по усилению определяется как а,„ = т1(\ - т). Если реле имеет гистерезис, то в результате эксперимента получают частоту, при которой передаточная функция контура пересекает часть окружности А (см. рис. 7). |
|
|
|
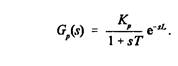
Запас по фазе можно определить аналогично, используя релейную обратную связь, как это показано на рис. 8. Предположив, что реле идеально, и воспользовавшись описывающими функциями, можно установить, что в системе будут совершаться колебания с частотой, определяемой точкой пересечения годографа коэффициента усиления. Запас по фазе можно в этом случае найти по сдвигу фазы между входным и выходным сигналами объекта. 4. Применение В настоящее время адаптивные методы используются столь широко, что было бы достаточно трудно дать всеобъемлющий обзор их применения. В этом разделе приводятся отдельные примеры их использования, описываются некоторые промышленные изделия и области применения. 4.1. Использование адаптивных методов Здесь рассматриваются несколько различных путей использования адаптивных методов. Автоматическая настройка ПИД регуляторов - в настоящее время наиболее широкая область применения методов адаптации. Первая причина состоит в том, что ПИД регуляторы достаточно просты, вторая - что они используются в огромном количестве, третья - что время их разработки весьма мало. Сообщения о промышленном использовании ПИД регуляторой [23, 40] также ясно показывают необходимость автоматической настройки в промышленном масштабе. Некоторые общие принципы последней были рассмотрены в |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.