Данные об оценках параметров могут способствовать извлечению большей информации о контуре управления [6]. Можно определить статическую нелинейность, а также такие динамические характеристики, как время запаздывания, нули и полюса в правой полуплоскости, существенно ограничивающие качество системы. Регулятор, таким образом, может поставлять информацию для оценивания контура регулирования, весьма полезную при модернизации объекта. Нелинейности в исполнительных устройствах, такие как люфт и трение,-другие явления лимитирующие качество управления. Информацию о них также способен дать адаптивный регулятор.
|
|
систем, имеющих единственный устойчивый предельный цию при релейной обратной связи. Решение этой задачи позволи' указать ситуации, в которых безопасно использовани» релейной обратной связи.
Даже скромные усовершенствования существующих адаптивных систем открывают широкие возможности длэ создания систем с интегрированным управлением и диагности кой, общим оцениванием контура и качества.
Для регуляторов, разработанных по количественным спецификациям, удается определить, соответствует ли их функционирование этим спецификациям; для задач регулирования - оценить наилучшее возможное качество функционирования. Система, таким образом, может быть оснащена средствами оценивания качества функционирования.
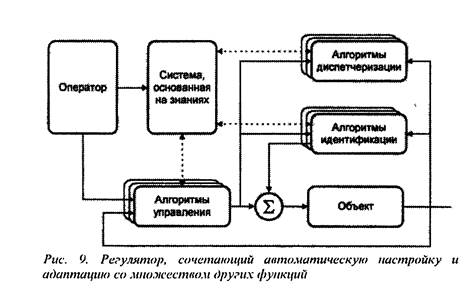
Экспертное управление. Структура системы, сочетающей в себе автоматическую настройку и адаптивное управление с оцениванием контура и качества функционирования, изображена на рис. 9. В этой системе несколько различных регуляторов, алгоритмов оценивания и анализа данных, а также механизмы для переключения алгоритмов. Системы такого типа исследованы в работах [5, 8]. В последнее время был достигнут прогресс в анализе системы с переключениями упомянутого типа [99].
5. Выводы
Основная масса работ по адаптивному управлению на раннемэтапеегоразвитиябыла сфокусирована на управлении линейными системами. Теперь это уже достаточно разработанная область. Задачи в детерминированной и стохастической постановках рассматривались в непрерывном и дискретном времени. Хорошо развиты такие методы, как адаптивное управление с эталонной моделью и управление с самонастройкой. Поведение полученной в результате замкнутой системы также изучено достаточно хорошо. Определены строгие условия устойчивости и сходимости. Показано, что системы могут иметь весьма сложное поведение, которое в значительной степени зависит от входного сигнала: система может вести себя хаотично в присутствии немоделируемой динамики, особенно при плохом выборе расчетных параметров. Ведутся весьма интересные разработки в области адаптивного управления нелинейными системами. Они идут в нескольких направлениях. Одно из направлений стимулируется новыми достижениями в нелинейной теории управления, в основе другого лежит использование нейронных сетей. Проводятся также исследования в сфере систем с переключениями,
Перечисленные идеи и подходы лежат в основе промышленных изделий. Настройка регуляторов - поистине плодоносная область. Для простых регуляторов типа ПИД создано несколько поколений автонастройщиков. Эти системы сейчас включают в себя такие функции, как автоматическая настройка, автоматическая генерация программ для изменения коэффициента усиления, непрерывная настройка параметров прямой и обратной связи. Всеэто реализовано таким образом, что системы весьма просты в использовании.
Несмотря на достигнутый прогресс, достаточное число сложных проблем требуют разрешения. Огромное значение приобретает введение в самонастривающиеся регуляторы элементов дуального управления. Весьма интересная и важная с позиций зрения приложения к автоматической настройке теоретическая проблема - классификация всех линейных
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.