Зная отношение Фишера можно определить
уровень значимости α и проверить справедливость гипотез Н0
или Н1. Следует отметить, что не все греко-латинские квадраты
можно построить. Например, квадраты ![]() и
и ![]() невозможно реализовать.
невозможно реализовать.
Ограничения, связанные с латинскими планами:
1) не учитываются межфакторные взаимодействия;
2) число уровней р у всех факторов одинаково.
6. СТАТИСТИЧЕСКИЙ АНАЛИЗ АВТОРЕГРЕССИОННЫХ
ДИНАМИЧЕСКИХ ЗАВИСИМОСТЕЙ.
 Связь
между входом и выходом динамической системы, если входной сигнал – функция,
заданная в определенные моменты времени (решетчатый сигнал) определяется
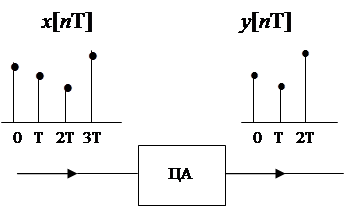
алгоритмом преобразования сигнала ЦА (рис. 22). Если использовать дискретные
преобразования Лапласа для нахождения изображения решетчатых функций.
Связь
между входом и выходом динамической системы, если входной сигнал – функция,
заданная в определенные моменты времени (решетчатый сигнал) определяется
алгоритмом преобразования сигнала ЦА (рис. 22). Если использовать дискретные
преобразования Лапласа для нахождения изображения решетчатых функций.
рис. 22
Преобразование входного сигнала x[nT] в выходной y[nT].
или при замене переменной ![]()
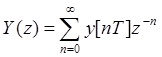
Изображение выходного сигнала определяется аналогично.
Если представить передаточную функцию дискретной системы в виде:
то связь между входными и выходными сигналами дискретной системы (в области изображений) имеет вид:
![]()
Из этого уравнения получим  или
или
![]()
Переходим к выражению, записанному в оригиналах, учитывая, что:
![]()
В соответствии с теоремой запаздывания :

Откуда
![]()
Если знать значение х[kT] в настоящий и предыдущие моменты времени и у в предыдущие моменты времени, то можно определить у[kT] в настоящий момент времени. Т.е. полученное выражение представляет собой алгоритм, по которому можно определить y[kT] в любой момент времени.
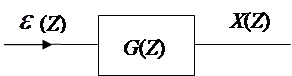
Рассмотрим новую систему (рис. 23):
 |
![]()
рис. 23
Системы G(z) со случайным входным сигналом ![]() (z).
(z).
По аналогии с рассмотренным выше примером находим:
![]()
Если G(z) имеет вид:

Предположим, что ![]() -
независимые случайные величины с нормальным законом распределения и дисперсии,
равной σ2. Т.е.:
-
независимые случайные величины с нормальным законом распределения и дисперсии,
равной σ2. Т.е.:

Тогда ![]()
Это уравнение является уравнением регрессии. Выходная переменная х[kT] в к – ый момент времени зависит от значений этой же переменной в предыдущие моменты времени. Это уравнение определяет так называемую модель авторегрессии. Если предположим, что все bi = 0, тогда
![]()
Это уравнение определяет так называемую модель скользящего среднего. Если уравнение содержит все ai и bi , то она определяет модель авторегрессии и скользящего среднего. Рассмотрим модель авторегрессии первого порядка, которая задается передаточной функцией.
Во временной области для этой модели можно получить
следующее уравнение: ![]()
Если обозначить ![]() то
получим :
то
получим :
![]()
Меняя значения к = 1, 2, …, п, получим:
Для решения этой системы уравнений можно
применить метод наименьших квадратов, минимизируя величину  тогда:
тогда:
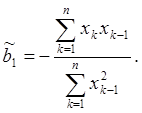
Таким образом, если на вход системы поступает случайный сигнал с заданными характеристиками, и на выходе снимаются данные, то можно определить b1 и узнать, по какому алгоритму осуществляется преобразование входного сигнала в рассматриваемой системе. Аналогично могут быть решены задачи, связанные с определением коэффициентов ai и bi в более сложных случаях.
При помощи авторегрессионного метода можно решать следующие задачи:
1) Определение неизвестных параметров динамической системы (аналогично выше приведенному примеру).
2) Прогнозирование временных рядов. Т.е. прогнозировать будущие значения выходной переменной, в том числе и доверительный интервал для этих значений, на основании анализа предыдущих значений этой переменной.
3) Задачи, связанные с моделированием случайных временных рядов с заданными статистическими характеристиками при имитационном моделировании случайных процессов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.