Рисунок 4.1.2 – Переходные процессы скорости и тока
по возмущающему воздействию
САУ с параллельной коррекцией
(охват тиристорного преобразователя и двигателя)
Мы получаем наилучшие показатели при охвате контура тока с учётом противо-ЭДС. Для данного способа охвата мы получаем достаточно простое корректирующее устройство и хорошие показатели качества переходного процесса. Построим переходный процесс скорости при управляющем воздействии (представлен на рисунке 4.1.3). Так же строим переходные процессы скорости и тока по возмущающему воздействию (рисунок 4.1.4).
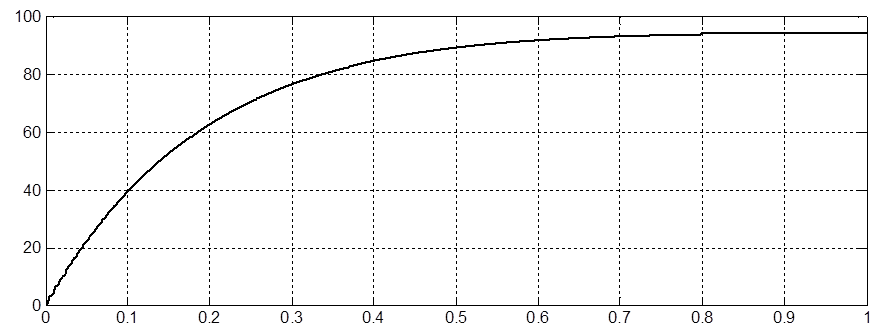
Рисунок 4.1.3 – Переходный процесс скорости
по управляющему воздействию
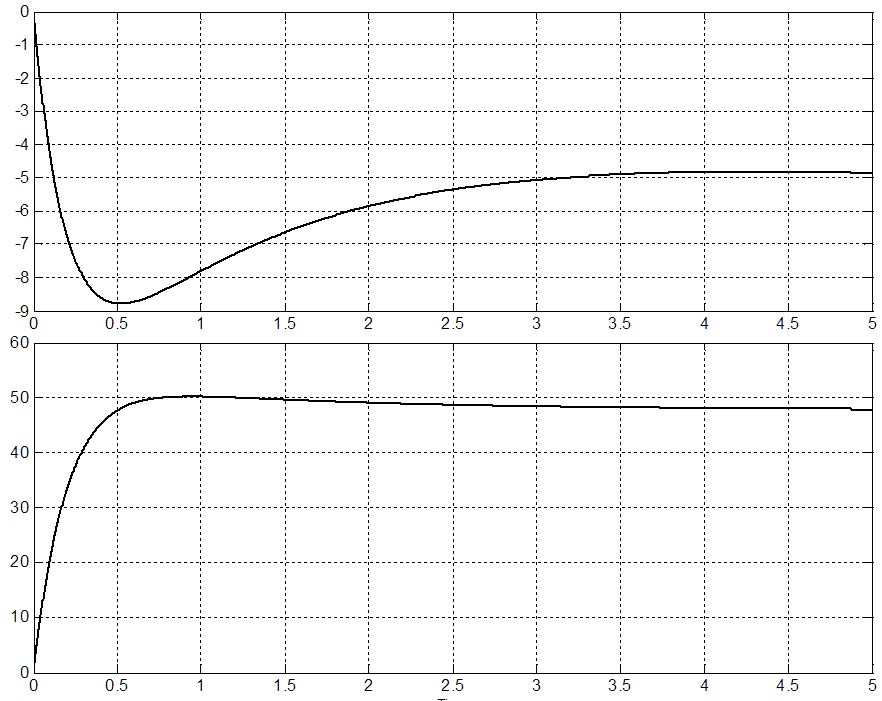
Рисунок 4.1.4 – Переходные процессы скорости и тока
по возмущающему воздействию
Система подчинённого регулирования
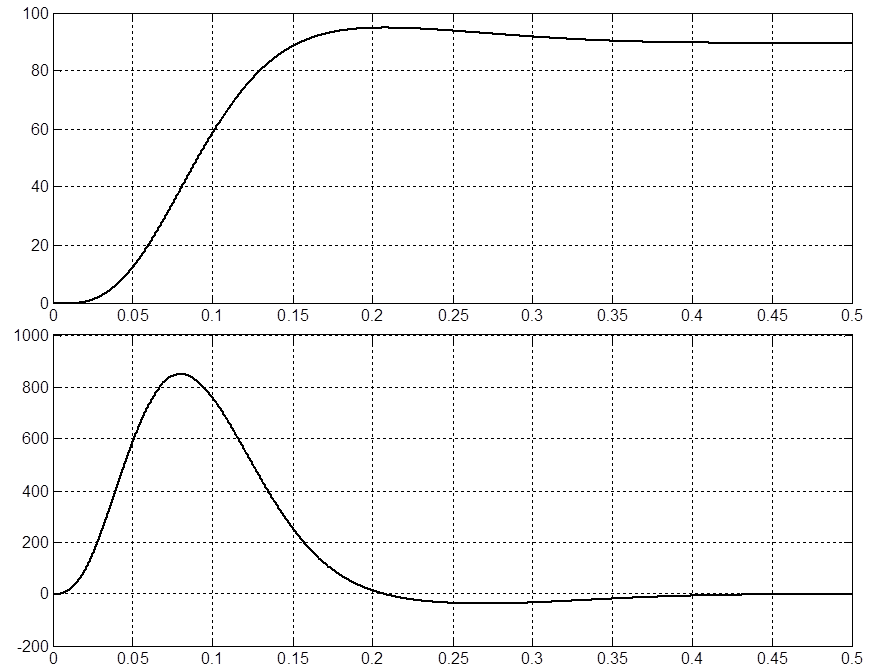
Рисунок 4.1.5 – Переходные процессы скорости и тока
по управляющему воздействию
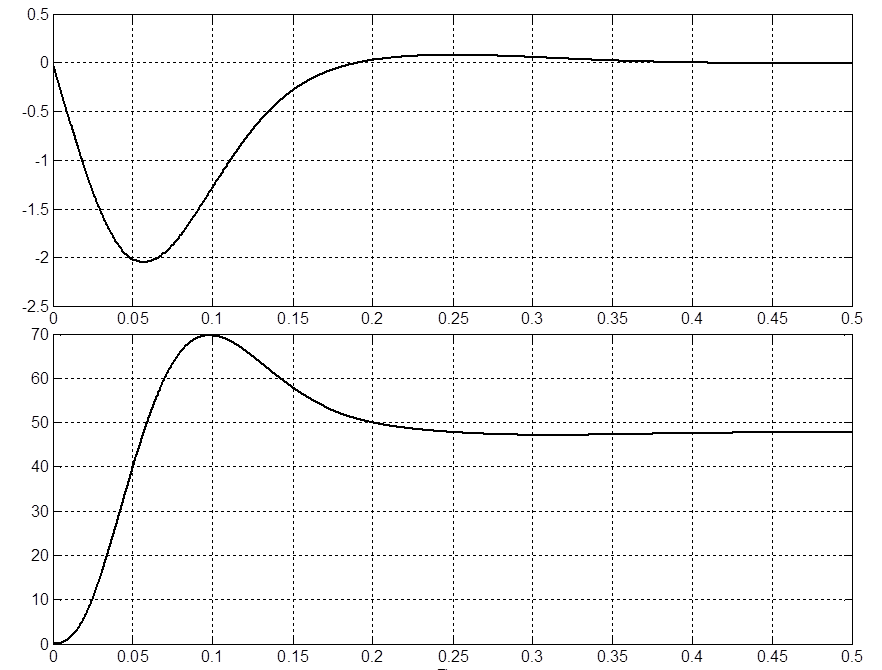
Рисунок 4.1.6 – Переходные процессы скорости и тока
по возмущающему воздействию
САУ с последовательной коррекцией
По переходным процессам по управляющему воздействию находим показатели качества:
– перерегулирование: 5% (меньше заданного 25%);
– время переходного процесса: 1.8 с (вход в зону с отклонениями 2%) или 13.8 Тм;
– время первого согласования: 0.5 с.
Переходный процесс скорости – апериодический. Параметры переходного процесса близки к заданным. По переходному процессу тока определяем пиковый ток: 400 А (8.3Iн). Данный ток меньше тока короткого замыкания (628.6 А), но больше предельно допустимого (так как ток ничем не ограничивается).
По переходным процессам по возмущающему воздействию видно, что при приложении нагрузки равной номинальной происходит просадка скорости на 4.4% (максимальная). После переходного процесса просадка скорости имеет нулевое значение, так как по возмущению имеется астатическое регулирование. Время переходного процесса: 0.4 с (3Тм). Перерегулирование тока составляет 20% (в пределах допустимых значений).
САУ с параллельной коррекцией
(охват тиристорного преобразователя и двигателя)
По переходному процессу скорости видно, что параметры ниже предельно допустимых:
– перерегулирование: 4.4% (меньше заданного 25%);
– время переходного процесса: 1.19 с (вход в зону с отклонениями 2%) или 14.6 Тм;
По переходным процессам по возмущающему воздействию видно, что при приложении нагрузки равной номинальной происходит просадка скорости на 5.5%. При этом максимальная просадка составляет 9.5% от номинального значения скорости. Время переходного процесса: 1.43 с (11Тм). Перерегулирование тока составляет 4.7% (в пределах допустимых значений).
Система подчинённого регулирования
По переходному процессу скорости видно, что параметры ниже предельно допустимых:
– перерегулирование: 5.5% (меньше заданного 25%);
– время переходного процесса: 0.31 с (вход в зону с отклонениями 2%) или 2.4 Тм;
– время первого согласования: 0.155 с (или 1.19Тм).
Переходный процесс скорости очень быстр (но время первого согласования меньше Тм). Вследствие большой скорости переходного процесса, наблюдается большой скачёк тока. По переходному процессу тока определяем пиковый ток: 850 А (17.7Iн). Данный ток превышает ток КЗ (для ограничения такого тока необходимо ставить задатчик интенсивности или ограничитель).
По переходным процессам по возмущающему воздействию видно, что при приложении нагрузки равной номинальной не происходит просадки скорости (астатическое регулирование по возмущающему воздействию). При этом максимальная просадка составляет 2.2% от номинального значения скорости. Время переходного процесса: 0.08 с (0.61Тм). Перерегулирование тока составляет 467%.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.