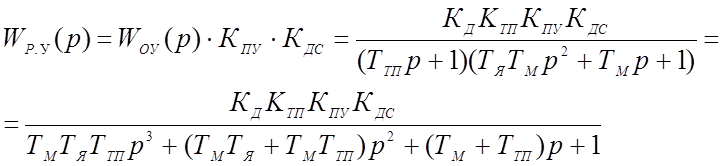
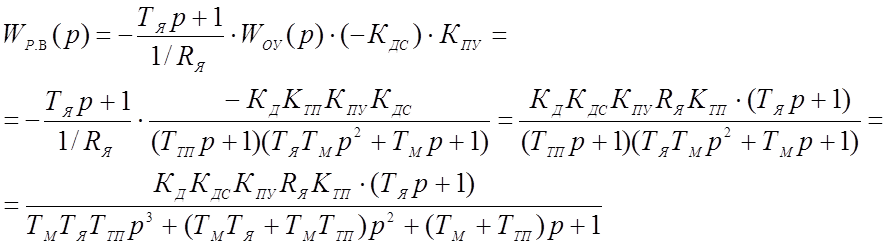
Передаточная функция САУ в разомкнутом состоянии по управляющему воздействию определится:
Преобразуем исходную структурную схему к следующему виду:
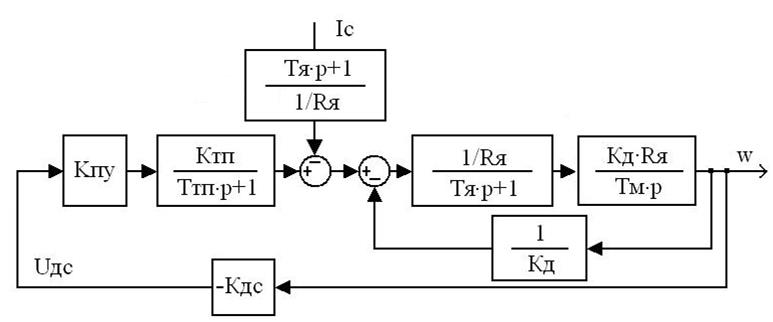
Рисунок 1.2.1 – Преобразованная структурная схема, необходимая
для нахождения передаточных функций по возмущению.
Передаточная функция разомкнутой системы по возмущающему воздействию:
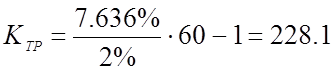
Из условия статической точности (δ = 2%) и заданного диапазона регулирования (D = ωmax/ ωmin= 60) определим требуемый коэффициент усиления разомкнутой системы:
![]()
![]()

![]()

* Передаточная функция разомкнутой системы по управляющему воздействию:

* Передаточная функция замкнутой системы по управляющему воздействию:
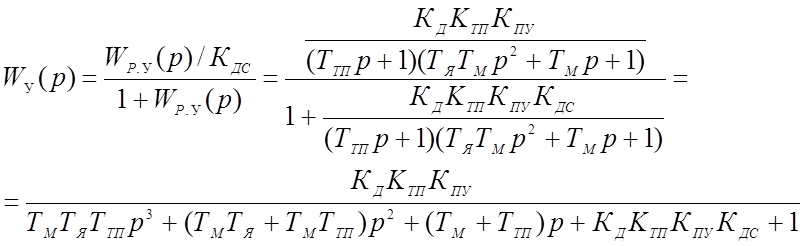
Подставив значения коэффициентов, получим:

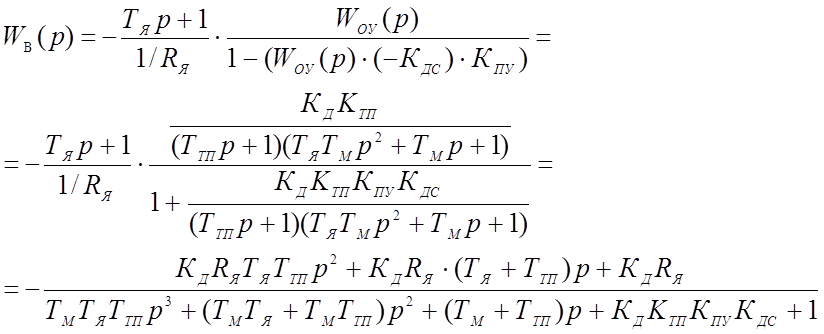
* Передаточная функция разомкнутой системы по возмущению:

* Передаточная функция замкнутой системы по возмущению:

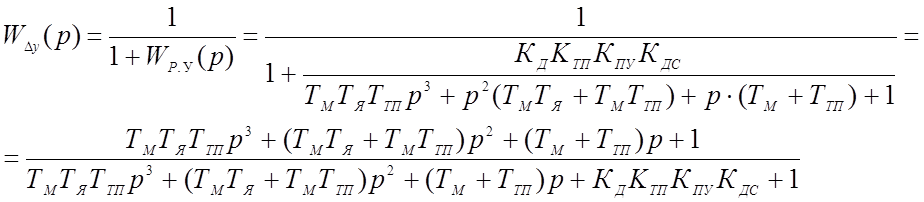
* Передаточная функция по ошибке от управляющего воздействия:

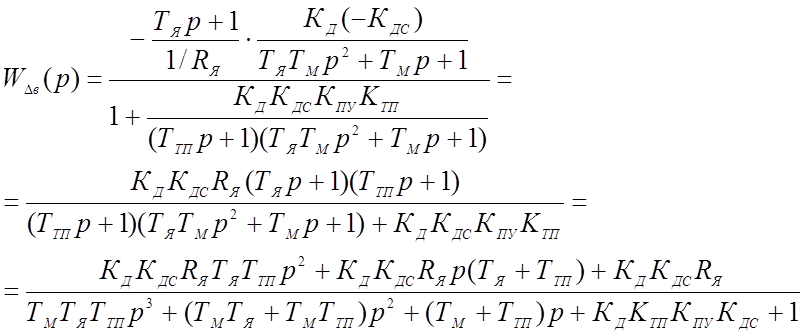
* Передаточная функция по ошибке от возмущающего воздействия:

По полученным в предыдущем пункте передаточным функциям можно сделать следующие выводы:
– знаменатели передаточных функций разомкнутых систем по управляющему и возмущающему воздействию равны;
– знаменатели передаточных функций замкнутых систем по управляющему и возмущающему воздействию, а так же знаменатели передаточных функций ошибки от управляющего и возмущающего воздействия, равны;
Исходная система является статической как по управляющему, так и по возмущающему воздействию, так как в передаточных функциях разомкнутой системы по управляющему и по возмущающему воздействию отсутствует звено чистого интегрирования.
По передаточной функции ошибки от управляющего воздействия вычислим статическую ошибку системы:
 , что меньше заданного
значения
, что меньше заданного
значения ![]() .
.
Воспользуемся алгебраическим критерием Рауса.
Характеристический полином получим из передаточной функции замкнутой системы по управляющему воздействию:

Характеристический полином:
![]()
По данному уравнению строим таблицу Рауса:
|
Номер |
Номер столбца |
|
|
1 |
2 |
|
|
1 |
0.000052 |
0.14 |
|
2 |
0.0065 |
229.1 |
|
3 |
|
0 |
|
4 |
|
– |
Таблица 2.1.1 – Таблица Рауса.
По условию критерия Рауса система устойчива, если положительны все коэффициенты первого столбца таблицы. По таблице 2.1.1 видно, что рассматриваемая система неустойчива, так как имеет отрицательный элемент в первом столбце.
Воспользуемся частотным критерием устойчивости Найквиста. Для использования данного критерия необходимо знать передаточную функцию разомкнутой системы по управляющему воздействию:

По критерию Найквиста, система устойчива, если годограф не охватывает точку (-1; j0). По рисунку 2.2.2 видно, что данная система неустойчива.
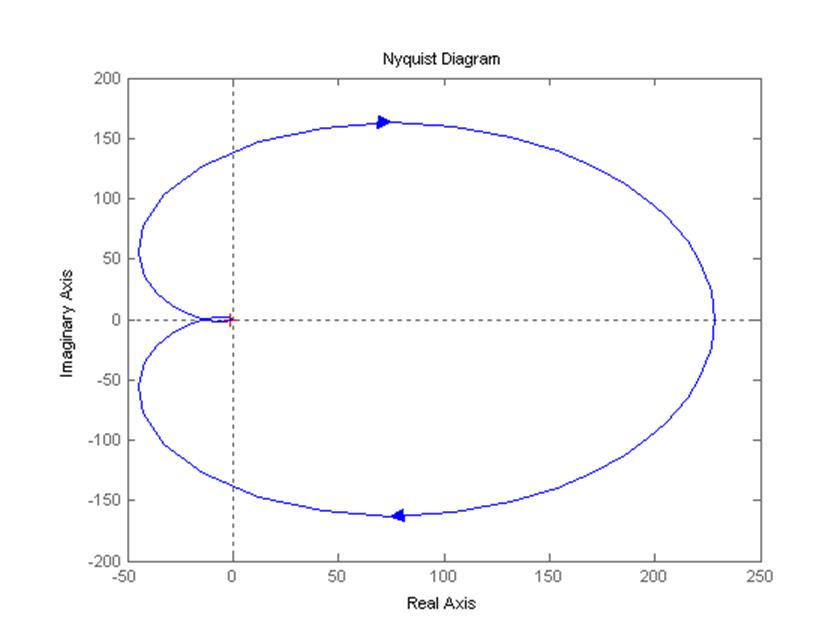
Рисунок 2.2.1 – Годограф Найквиста (общий вид годографа).
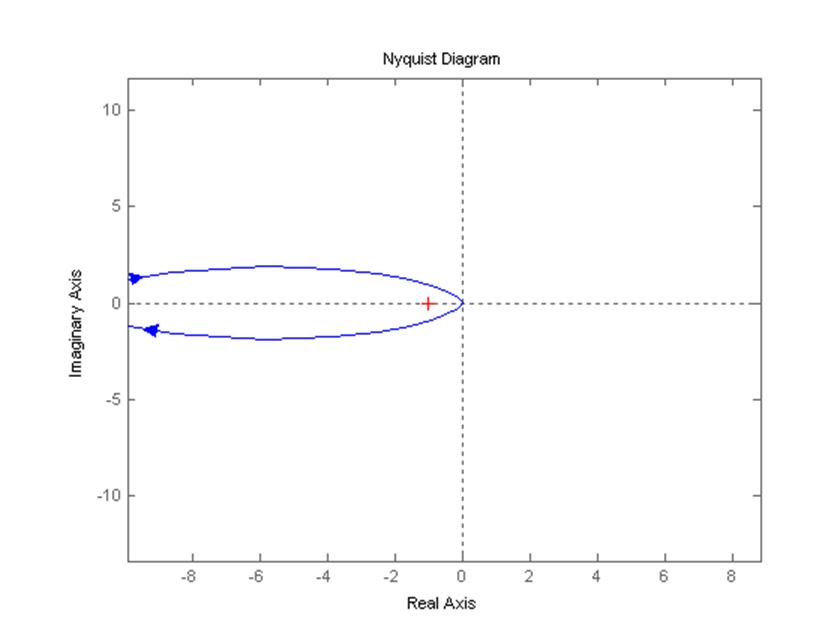
Рисунок 2.2.2. – Годограф Найквиста (вид годографа вблизи точки (-1; j0)).
Для анализа влияния коэффициента усиления разомкнутой системы на устойчивость построим корневой годограф.
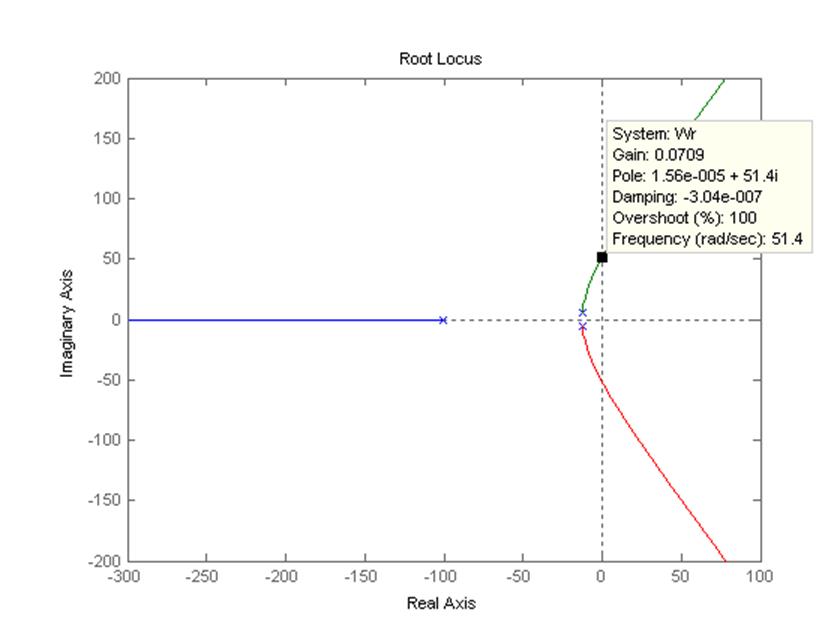
Рисунок 2.3.1 – Корневой годограф.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.