Федеральное агентство по образованию
Государственное образовательное
учреждение
высшего профессионального образования
“Сибирский государственный индустриальный университет”
Кафедра АЭП и ПЭ
Отчет по курсовой работе
????????????????????????????????????????????????
Вариант № 3
Выполнил: студент гр.АЭП-041
Дружилов А.С.
Принял: к.т.н., доцент
Богдановская Т.В.
Новокузнецк, 2007 г.
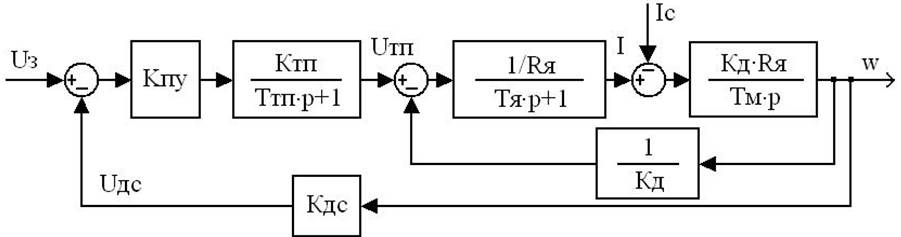
Структурная схема системы автоматического управления электроприводом
|
Параметры структурной схемы |
||||||||
|
Тя, с |
Тм, с |
Rя, Ом |
Кд, (рад/с)/В |
Кдс, В/(рад/с) |
Кдт, В/А |
ωном, рад/с |
Iном, А |
Рном, кВт |
|
0.04 |
0.13 |
0.35 |
0.44 |
0.0689 |
0.08 |
90 |
48 |
9 |
|
Заданные показатели качества управления и критерии устойчивости |
|||
|
Ошибка регулирования δ, % |
Время регулирования tПП, с |
Диапазон регулирования D |
Критерии |
|
2 |
2.0 |
60 |
Рауса, Найквиста |
Номинальное напряжение двигателя: Uн = 220 В.
Перерегулирование скорости: σ = 25 %.
Параметры тиристорного преобразователя:
Ктп = 22;
Ттп = 0.01 c.
Задание на курсовую работу....................................................... 2
Оглавление........................ Ошибка! Закладка не определена.
Введение........................................................................................ 4
1. Анализ исходной САУ............................................................. 5
1.1 Преобразование САУ к одноконтурному виду................................ 5
1.2 Определение передаточной функции САУ в разомкнутом состоянии.................................................................................................... 5
1.3 Определения передаточных функций по управляющему, возмущающему воздействию и по ошибке............................................ 7
1.4 Определение требуемого коэффициента усиления разомкнутой системы из условия статической точности САУ................................... 6
1.5 Выводы по проведённому анализу.................................................... 8
2. Анализ устойчивости САУ...................................................... 9
2.1 Анализ устойчивости замкнутой САУ с помощью алгебраического критерия........................................................................ 9
2.2 Анализ устойчивости с использованием частотного критерия..... 9
2.3 Анализ влияния коэффициента усиления разомкнутой САУ на устойчивость............................................................................................ 11
2.4 Построение и анализ диаграммы Боде для разомкнутой САУ..... 12
2.5 Выводы по анализу устойчивости САУ.......................................... 13
3. Синтез САУ............................................................................ 13
3.1 Выбор и обоснование методов синтеза........................................... 13
3.2 Расчёт и построение асимптотической ЛАХ исходной САУ и желаемой ЛАХ......................................................................................... 13
3.3 Синтез последовательного корректирующего устройства........... 15
3.4 Синтез параллельного корректирующего устройства.................. 16
3.5 Выбор схем реализации корректирующих устройств и расчёт их параметров................................................................................................ 17
3.6 Определение фактических запасов устойчивости скорректированных систем.................................................................... 19
3.7 Структурно-параметрический синтез САУ, определение ПФ и параметров регуляторов.......................................................................... 21
4. Анализ скорректированной САУ.......................................... 26
4.1 Расчёт переходных процессов в скорректированных САУ по управляющему и по возмущающему воздействиям............................ 26
4.2 Оценка качества переходного процесса скорректированной САУ и сравнение с заданными показателями............................................... 31
5. Выводы по работе.................................................................. 33
5.1 Сравнительная характеристика различных видов коррекции с учётом схемы их реализации.................................................................. 33
Передаточная функция объекта управления имеет вид:
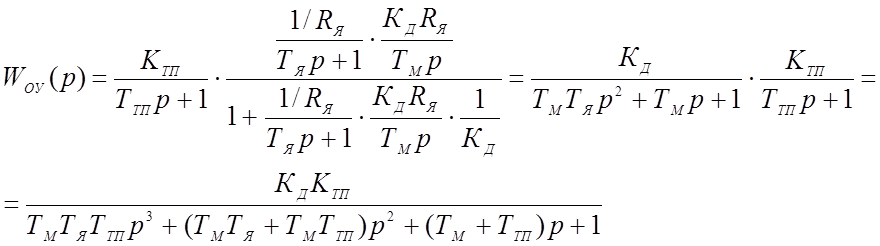
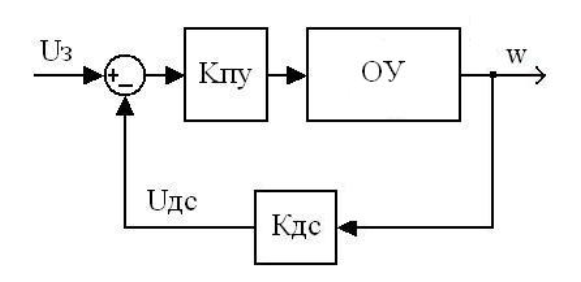
Рисунок 1.1.1 – Одноконтурная САУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.