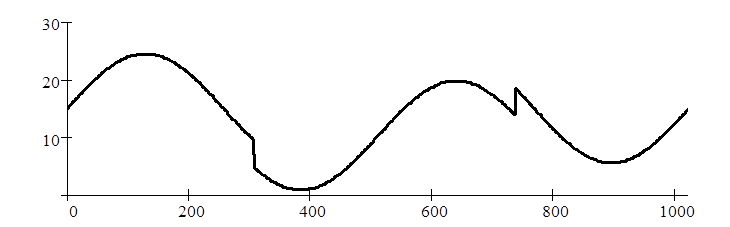
Рис. 6. Тестовый сигнал без помех (а) и временная реализация этого сигнала, искаженного аддитивным шумом с дисперсией 0,001 и
импульсной
помехой с ![]() =1,0 и
=1,0 и ![]() =0,03
=0,03
Ситуация 3. Импульсные помехи (аномальные измерения) могут отсутствовать, но статистические характеристики шума или ошибок измерений могут быть сигнально-зависимыми или просто изменяющимися во времени. Приведем несколько типичных примеров.
Принцип работы некоторых датчиков состоит в том, что в течение временного интервала заданной длительности считается количество событий, например, импульсов для радиационных датчиков или изменений частоты (фазы) для систем обработки частотно- или фазоманипулированных сигналов. При этом для однократных измерений имеет место помеха с ПРВ по Пуассону, описываемая в виде
 (2)
(2)
где l –
среднее число событий, удовлетворяющее условию ![]() .
Пример такого процесса (последовательности измерений при постоянном
.
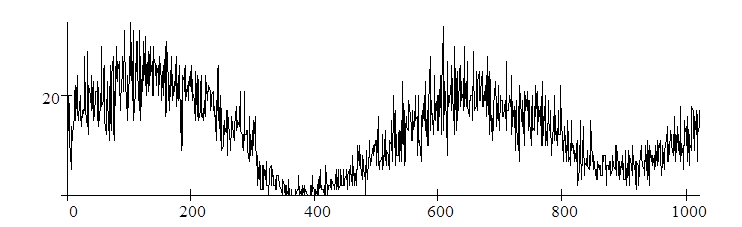
Пример такого процесса (последовательности измерений при постоянном ![]() ) показан на рис. 7.
Специфика случайных величин, подчиняющихся ПРВ Пуассона, состоит также в том,
что они принимают только целые значения и их ПРВ несимметрична относительно математического
ожидания, равного l. Кроме того, дисперсии и,
соответственно, среднеквадратическое отклонение (СКО) зависят от математического
ожидания (дисперсия равна l, а СКО –
) показан на рис. 7.
Специфика случайных величин, подчиняющихся ПРВ Пуассона, состоит также в том,
что они принимают только целые значения и их ПРВ несимметрична относительно математического
ожидания, равного l. Кроме того, дисперсии и,
соответственно, среднеквадратическое отклонение (СКО) зависят от математического
ожидания (дисперсия равна l, а СКО – ![]() ).
).
Таким
образом, если ![]() изменяется во времени, то
изменяется и дисперсия ошибок измерений.
изменяется во времени, то
изменяется и дисперсия ошибок измерений.

Рис. 7. Процесс с пуассоновским законом распределения
при
постоянном ![]()
Тогда
более удобная модель представления наблюдаемого процесса ![]() описывается выражением
описывается выражением
![]() ,
(3)
,
(3)
где ![]() характеризует мультипликативные или
сигнально-зависимые помехи (ошибки измерений) и имеет математическое ожидание,
равное единице, и статистические характеристики (закон распределения, дисперсию
и т.д.), зависящие в общем случае от
характеризует мультипликативные или
сигнально-зависимые помехи (ошибки измерений) и имеет математическое ожидание,
равное единице, и статистические характеристики (закон распределения, дисперсию
и т.д.), зависящие в общем случае от ![]() . Пример такого
процесса, для которого
. Пример такого
процесса, для которого ![]() представляет собой сигнал (см.
рис. 2, г) с добавленной к нему постоянной составляющей (см. рис. 8, а), а
мультипликативная помеха имеет дисперсию, пропорциональную
представляет собой сигнал (см.
рис. 2, г) с добавленной к нему постоянной составляющей (см. рис. 8, а), а
мультипликативная помеха имеет дисперсию, пропорциональную ![]() , приведен на рис. 8, б. На рисунке хорошо
видно, что интенсивность флуктуаций изменяется в зависимости от
, приведен на рис. 8, б. На рисунке хорошо
видно, что интенсивность флуктуаций изменяется в зависимости от ![]() .
.
а
б
Рис. 8. Тестовый сигнал (а), искаженный сигнально-зависимой
помехой (б)
Одним
из основных факторов, определяющих точность оценок параметров (обычно
характеризуемую дисперсией этих оценок) в радиотехнических и других
информационно-измерительных системах является соотношение сигнал–шум ![]() на входе системы [5].
Однако это соотношение может изменяться во времени. Например, для систем
радиолокации движущихся объектов или траекторных измерений, определяющих
параметры траектории движения объектов (координаты и их производные),
на входе системы [5].
Однако это соотношение может изменяться во времени. Например, для систем
радиолокации движущихся объектов или траекторных измерений, определяющих
параметры траектории движения объектов (координаты и их производные), ![]() зависит от расстояния до объекта. Это расстояние,
очевидно, не остается постоянным в процессе слежения. Следовательно, имеет
место нестационарность статистических характеристик
зависит от расстояния до объекта. Это расстояние,
очевидно, не остается постоянным в процессе слежения. Следовательно, имеет
место нестационарность статистических характеристик ![]() . В этом
случае статистические характеристики
. В этом
случае статистические характеристики ![]() в выражении
в выражении ![]() зависят от измеряемого параметра q
(например угловых координат) или, в общем случае, от вектора параметров
зависят от измеряемого параметра q
(например угловых координат) или, в общем случае, от вектора параметров ![]() , характеризующих объект, для которого
выполняется измерение его параметров.
, характеризующих объект, для которого
выполняется измерение его параметров.
На практике могут иметь место и другие комбинации свойств сигналов и помех. Тогда используются более сложные модели, чем (1) или (3). Однако для дальнейшего анализа важно следующее:
1) для многих практических приложений имеет место нестационарность характеристик сигналов и помех;
2)
имеется
острая необходимость фильтровать наблюдаемые процессы в целях либо получения
оценки  , которая была бы более близкой к
, которая была бы более близкой к ![]() , чем наблюдаемый на фоне помех сигнал
, чем наблюдаемый на фоне помех сигнал ![]() , либо для формирования более точных оценок
некоторых параметров информационной составляющей
, либо для формирования более точных оценок
некоторых параметров информационной составляющей ![]() .
.
Необходимо
иметь в виду, что любая фильтрация (линейная или нелинейная) наряду с полезным
эффектом подавления помех неизбежно приводит к определенным искажениям,
зависящим как от свойств и параметров сигнальной и помеховой составляющих, так
и от свойств и параметров используемого фильтра. При некоторых, обычно очень
больших, соотношениях сигнал–помеха на входе фильтра  ,
где
,
где , применение фильтра может привести к
увеличению среднеквадратической ошибки на его выходе
, применение фильтра может привести к
увеличению среднеквадратической ошибки на его выходе
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.