Здесь
же уместно проиллюстрировать невыполнение для СМФ первого условия линейности,
указанного в разд. 1. Рассмотрим окрестность характерного фрагмента – точки
перепада в предположении, что сигнал искажен гауссовым шумом с математическим
ожиданием, равным 0, и дисперсией порядка 2,0. Поскольку речь идет о цифровой
обработке, то предполагается, что значения ![]() – целые
числа. Для данного примера
– целые
числа. Для данного примера![]() .
.
В
табл. 1 приведены значения ![]() ,
, ![]() ,
, ![]() , и
, и ![]() ,
, ![]() , а
также
, а
также ![]() ,
, ![]() (результат
применения СМФ к сигнальной составляющей и шуму раздельно) и
(результат
применения СМФ к сигнальной составляющей и шуму раздельно) и ![]() для
для ![]() .
.
Таблица 1
Иллюстрация свойств СМФ
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
4 |
6 |
5 |
7 |
4 |
10 |
8 |
11 |
11 |
8 |
12 |
|
|
5 |
5 |
5 |
5 |
5 |
10 |
10 |
10 |
10 |
10 |
10 |
|
|
-1 |
1 |
0 |
2 |
-1 |
0 |
-2 |
1 |
1 |
-2 |
2 |
|
|
–– |
–– |
5 |
6 |
7 |
8 |
10 |
10 |
11 |
–– |
–– |
|
|
–– |
–– |
5 |
5 |
5 |
10 |
10 |
10 |
10 |
–– |
–– |
|
|
–– |
–– |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
–– |
–– |
|
|
–– |
–– |
5 |
5 |
5 |
10 |
10 |
10 |
11 |
–– |
–– |
Таким образом, ![]() для
i= 4,
5 и 6, то есть условие линейности не выполняется.
Более того, вследствие влияния помех
для
i= 4,
5 и 6, то есть условие линейности не выполняется.
Более того, вследствие влияния помех ![]() для
для ![]() перепад оказывается ²сглаженным².
перепад оказывается ²сглаженным².
В связи с тем, что СМФ, основанный на использовании устойчивой оценки и одновременно (N+1)/2-й порядковой статистики, характеризуется перечисленными выше преимуществами, в 80-е годы прошлого столетия основное внимание в области нелинейной фильтрации уделялось разработке и анализу свойств фильтров, в основу которых также положены порядковые статистики и методы робастного оценивания (см. разд. 4). Количество таких фильтров велико, и, обсуждая проблему выбора, авторы монографии “Fundamentals of Nonlinear Filtering” [2] Я. Астола и П. Куосманен говорят: ²Тысяча задач – тысяча решений². Поэтому ниже приведем основные группы фильтров данного класса и некоторых их представителей.
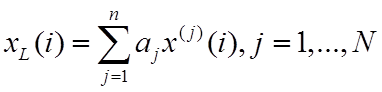
L-фильтры. Для этого широкого класса нелинейных фильтров, к которому можно отнести и СМФ, выходное значение получают в виде
 ,
(14)
,
(14)
где ![]() – j-я
порядковая статистика для выборки данных, сформированной из значений элементов,
принадлежащих скользящему окну размером N,
центр которого расположен в i-м
элементе фильтруемого процесса,
– j-я
порядковая статистика для выборки данных, сформированной из значений элементов,
принадлежащих скользящему окну размером N,
центр которого расположен в i-м
элементе фильтруемого процесса, ![]() – j-й
весовой коэффициент.
– j-й
весовой коэффициент.
Так
же, как и свойства L-оценок можно в широких
пределах изменять путем варьирования или выбора соответствующих наборов весовых
коэффициентов ![]() , свойства L-фильтров
можно изменять, достигая того или иного компромисса между устойчивостью к
импульсным помехам, сохранением характерных фрагментов и подавлением
флуктуационных помех. Более того, по аналогии с линейными адаптивными фильтрам
на основе L-фильтров разработаны методы
и алгоритмы нелинейной адаптивной фильтрации, для которых адаптация
осуществляется путем подстройки
, свойства L-фильтров
можно изменять, достигая того или иного компромисса между устойчивостью к
импульсным помехам, сохранением характерных фрагментов и подавлением
флуктуационных помех. Более того, по аналогии с линейными адаптивными фильтрам
на основе L-фильтров разработаны методы
и алгоритмы нелинейной адаптивной фильтрации, для которых адаптация
осуществляется путем подстройки ![]() .
.
Частным случаем L-фильтра является фильтр на основе a-урезанного среднего (trimmed mean), который также часто называют просто a-урезанным фильтром (АУФ)
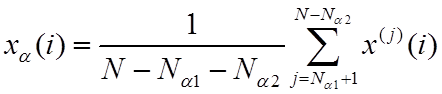 , (15)
, (15)
где Na1и Na2 – количество отбрасываемых в отсортированной выборке минимальных и максимальных значений соответственно.
Обычно на практике используют равные друг другу значения Na1 и Na2 или соотношения a1=Na1/N=a2=Na2/N. Свойства АУФ можно варьировать за счет изменения a. При больших a (порядка 0,4) они близки к свойствам СМФ, при малых a (порядка 0,1) – к свойствами ЛУФ при тех же N.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.